




























Triton Go Product Manual |
Wiring and Connections
INGENIA | 05/29/2017
55
59
http://doc.ingeniamc.com/display/KB/How+to+dia+power+for+an+drive
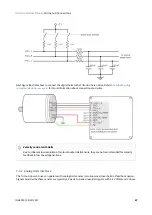
7.2 Power supply
The Triton Go Servo Drive is supplied from the Supply, shunt and motor connector, using the same terminal for
logic and power supply (8 V
DC
to 48 V
DC
). An internal DC/DC converter provides circuits with appropriate
voltages as well as regulated 5 V and 3.3 V output voltages to supply feedback sensors and I/O.
The Triton Go can be powered from USB for configuration purposes without the need of an external power
supply. An internal switch automatically chooses the power source prioritizing the external supply. Please note
that several functionalities will not be available when powered from USB.
7.2.1 Power supply requirements
The choice of a power supply is mainly determined by voltage and current ratings of the power supply. Main
requirements of the Triton Go power supply are:
• The
voltage
should be the targeted for the motor. This means up to
48 V
for all Triton Go part numbers
(
TRI-x/48-y-C
). Make sure that the voltage rating of the power supply does not exceed the voltage rating
of the motor, otherwise it could be damaged.
• The
current
should be the one able to provide the phase peak current of the application. This means up
to
1 A
for the
TRI-1/48-y-C,
up to
5
A
for the
TRI-4/48-y-C
and up to
8.5 A
for the
TRI-7/48-y-C.
Make
sure that the current rating for the power supply is at least as high as the motor.
•
The voltage and current range can be decreased due to the motor requirements.
Further information on how to dimension a power supply for the Ingenia drives can be found
.
Following are shown different power supply examples:
USB Powered Triton
When the Triton Go is powered
from USB
,
only basic configuration and programming options are
available
. The drive is not capable of driving a motor or sensing a feedback input due to USB power
limitations.
Disconnection recommendations
There are no critical instructions for disconnecting the Triton Go. Just some recommendations:
•
The board could be hot during < 1 min after disconnection.
•
Preferably do not disconnect the supply while having a motor in motion.
•
If working with Motion Lab with USB connection, preferably disconnect the drive from the
application before disconnecting. This prevents COM port corruption.







































































