





























44
Programmable robot with micro:bit
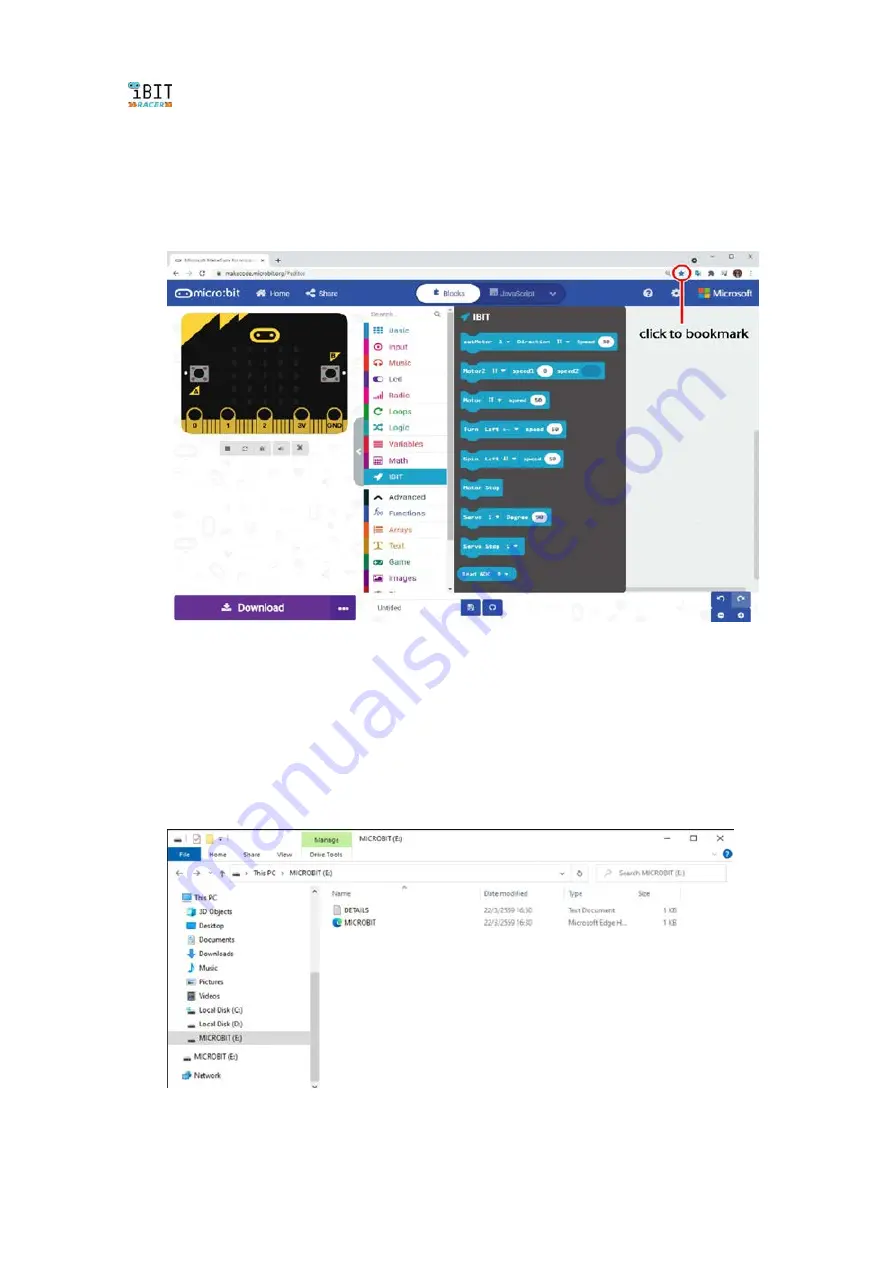
(6) Bookmark this webpage. Try to close web browser. Disconnect internet. Open
web browser again and open the MakeCode web page from bookmark. Now you
can coding with JavaScript Blocks Editor by offline.
4.1.2 Connect it
(1) Connect the micro:bit to the computer via a micro USB cable. Macs, PCs,
Chromebooks and Linux systems (including Raspberry Pi) are all supported.
(2) Your micro:bit will show up on your computer as a drive called ‘
MICROBIT
’.
Watch out though, it’s not a normal USB disk.
Summary of Contents for iBIT RACER
Page 4: ...4 Programmable robot with micro bit...
Page 18: ...18 Programmable robot with micro bit...
Page 30: ...30 Programmable robot with micro bit Now the BIT Racer robot is ready for coding and fun...
Page 38: ...38 Programmable robot with micro bit...
Page 50: ......
Page 61: ...Programmable robot with micro bit 61...
Page 63: ...Programmable robot with micro bit 63...







































































