




















Version 1.0 09/08/2017
http://www.inorea.com
62
Code
Parameter name
Setting range
Factory default
Change
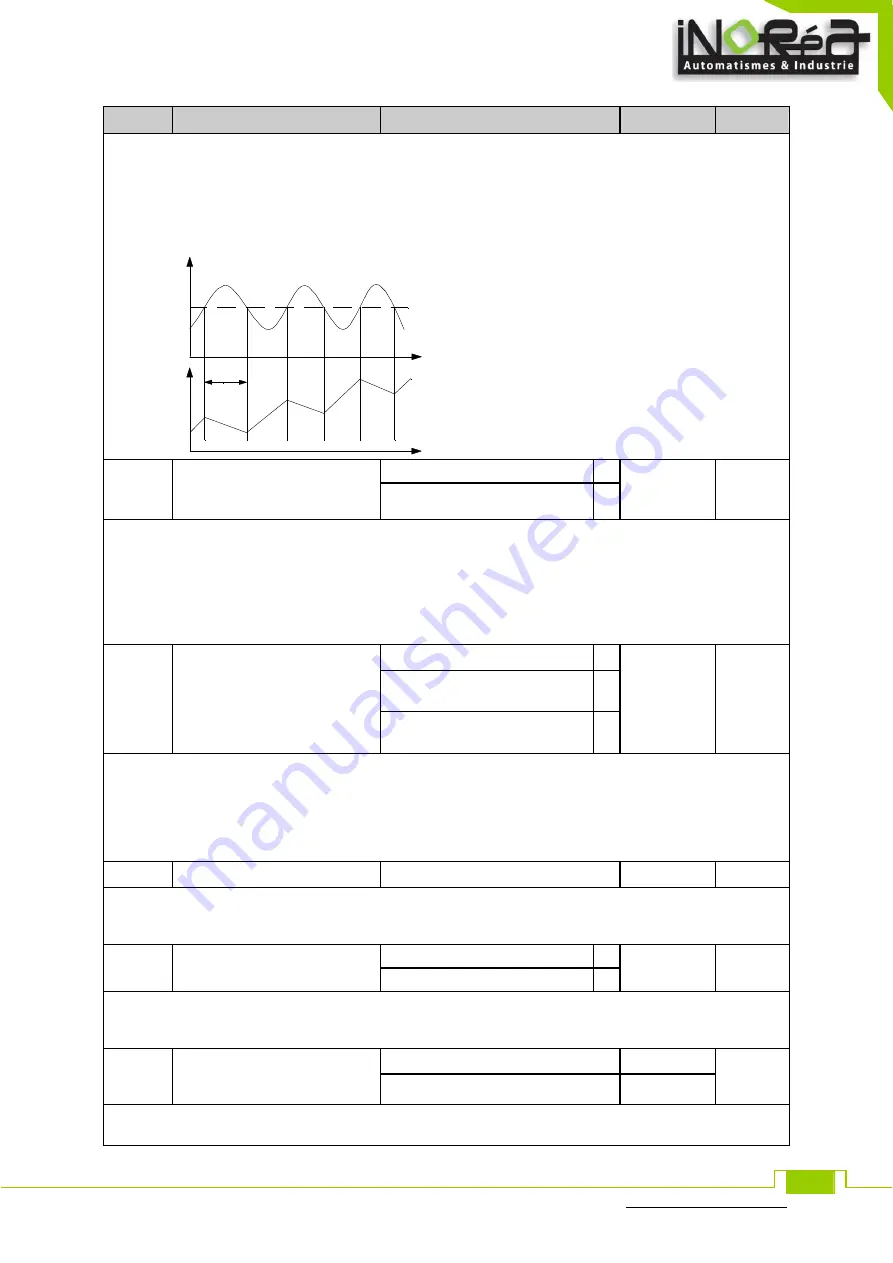
During the operation of Inverter, due to the load is too large, the actual rising rate of motor speed is lower than the rising
rate of output frequency of, if no measures are taken, it will result in acceleration overcurrent fault and afterwards cause
that the inverter trips.
During the operation of inverter, automatic current limiting function detects the output current, and compares with the
current limiting point defined by F8.00, and if the output current exceeds the current limiting point, the output frequency
of inverter will fall in accordance with the falling rate (F8.01
)
of over current frequency, when it is detected again that the
output current is below the current limiting point, then it resumes normal operation.
F8.02
Current limiting action selection
Current limiting always valid
0
0
☆
Current limiting invalid at constant
speed
1
Automatic current limiting function is always valid at the state of acceleration and deceleration, automatic current limiting
action selection (F8.02) is used to determine whether automatic current limiting function is valid or not at constant speed.
F8.02 = 0 indicates that automatic current limiting is valid at constant speed;
F8.02 = 1 indicates that automatic current limiting is invalid at constant speed;
When performing automatic current limiting action, the output frequency may vary, so the automatic current limiting
function is not suitable for the occasion that the more stable output frequency at constant speed is required.
When the automatic current limiting function is valid, the lower limit setting may affect the overload capacity of inverter.
F8.03
Motor overload protection selection
OFF
0
2
★
Ordinary motor (with low speed
compensation)
1
Inverter motor (without low speed
compensation)
2
0: OFF No motor overload protection (be caution), at this time, the inverter has not overload protection to load motor.
1: Ordinary motor (with low speed compensation) As the cooling effect of ordinary motor at low speed gets worse, the
corresponding electronic thermal protection value should be adjusted as appropriate, as mentioned here with low
compensation, it refers to lower the overload protection threshold of motor that the running frequency is less than 30HZ.
2: Inverter motor (without low speed compensation) Because the cooling function of the inverter dedicated motor is not
affected by speed, the low-speed protection adjustment is not required.
F8.04
Motor overload protection current
20.0% to 120.0% (rated motor current)
100.0%
☆
The formula of motor overload protection current:
Motor rated current * F8.04 * 158%, lasts for 10 minutes and then alarms motor overload;
Motor rated current * F8.04 * 200%, lasts for 1 minutes and then alarms motor overload;
F8.05
Overvoltage stall protection
Prohibit
0
0
☆
Allow
1
When the inverter decelerates, due to the effects from load inertia, it may occur that the actual falling rate of motor speed
is lower than the falling rate of output frequency, at the time the motor will feed back the power to the inverter so that the
inverter bus voltage rises, if no measures are taken, the rising of bus voltage will cause the inverter overvoltage fault.
F8.06
Overvoltage stall protection voltage
110 to 150% (220V series)
115%
☆
110 to 150% (380V series)
130%
Overvoltage stall protection voltage refers to that during the operation, the inverter detects the bus voltage and compares
it with the overvoltage stall point defined by F8.06 (relative to a standard bus voltage), if the bus voltage exceeds the
Frequency fall
rate depends on
F8.01
t
t
Output
frequency
Output
current