





























5 Troubleshooting
5
- 51 -
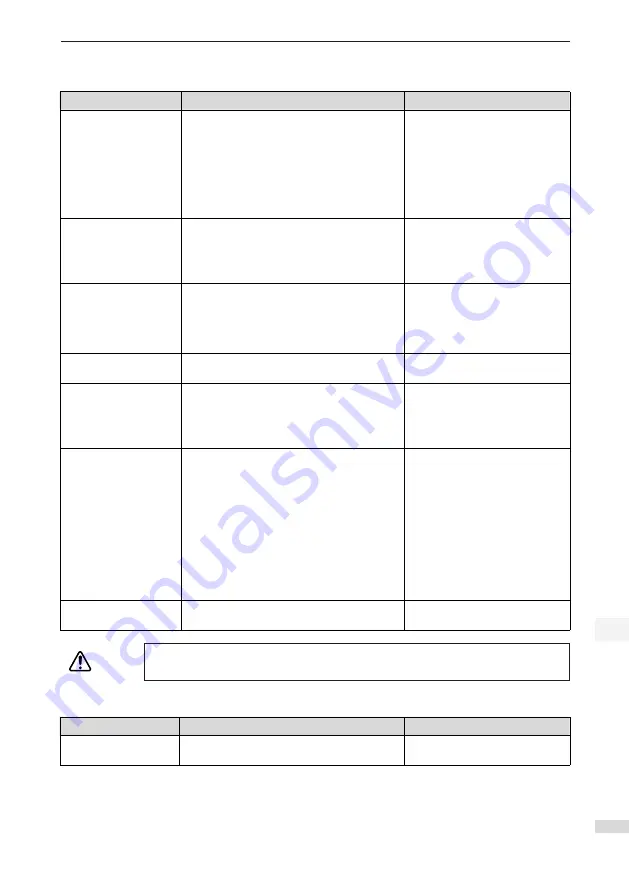
Er.620: Motor overload
Cause
Confirming Methods
Corrective Action
1. Wiring of motor and
encoder is incorrect or
poor.
Check wirings between servo drive, servo
motor and encoder according to correct wiring
diagram.
Connect wirings based on correct
wiring diagram.
Prefer to use the cable configured
by Inovance as standard.
When self-made cable is used,
make and connect wirings
according to hardware wiring
guidance.
2. The load is too heavy.
The motor keeps output
of effective torque higher
than rated torque for a
long time.
Confirm overload characteristic of servo drive or
servo motor.
Check whether average load rate (H0B-12) is
greater than 100.0% for long time.
Replace a large servo drive and
matching servo motor.
Reduce the load and increase
acceleration/deceleration time.
3. Acceleration/
deceleration is too
frequent or the load
inertia is too large.
Calculate the load inertia ratio or perform the
load inertia ratio auto-tuning. Then view H08-15
(load inertia ratio).
Conform single running cycle when servo motor
runs in circular.
Increase acceleration/deceleration
time during single running.
4. The gain is improper,
causing too high rigidity.
Observe whether motor vibrates and generates
noise during running.
Adjust the gain.
5. The servo drive or
motor model is set
incorrectly.
For IS650P series products, view serial encoder
motor model in H00-05 and servo drive model in
H01-02.
View servo drive nameplate and
set servo drive model (H01-02)
correctly and replace matching
servo motor according to the
IS650P User Manual.
6. Locked-rotor occurs
due to mechanical
factors, resulting in
very heavy load during
running.
Check running reference and motor speed
(H0B-00) by using the drive Inovance servo
commissioning software or keypad.
Running reference in position control: H0B-13
(input reference pulse counter)
Running reference in speed control: H0B-01
(speed reference)
Running reference in torque control: H0B-02
(internal torque reference)
Check running reference in corresponding mode
is not 0 but the motor speed is 0.
Eliminate mechanical factors.
7. The servo drive is
faulty.
The fault persists after servo drive is powered
on again.
Replace the servo drive.
CAUTION
You can clear the fault or re-power on the system 30s after overload occurs.
Er.625: Brake applied abnormally
Cause
Confirming Methods
Corrective Action
1. The motor brake is not
released.
Check whether the motor brake signal is active
and whether the brake switch is damaged.
Perform the wiring again or replace
the motor.
Summary of Contents for IS650P Series
Page 1: ......
Page 101: ...100 Revision History Date Version Change Description March 2017 A00 First issue...
Page 102: ......







































































