

























Appendix A Parameter Table
- 142 -
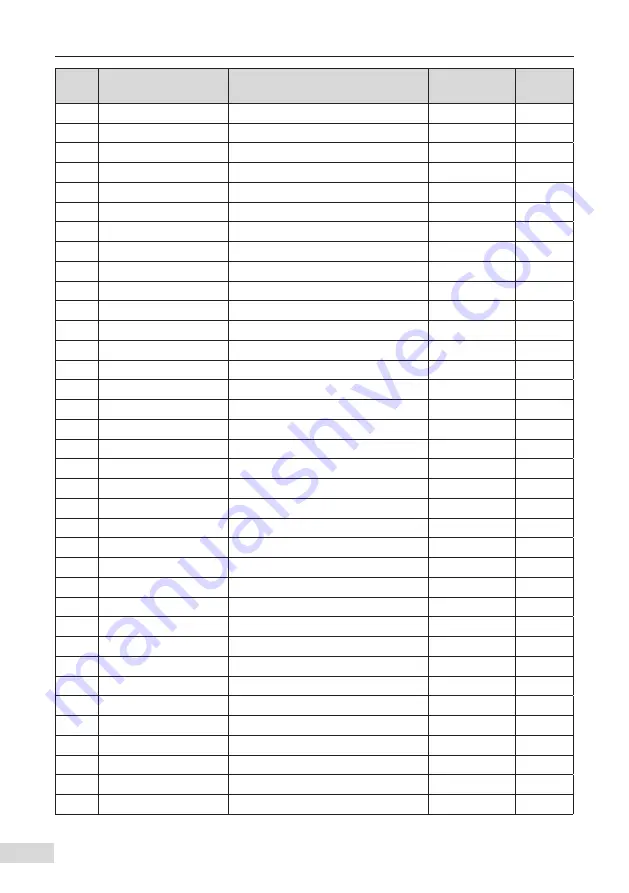
Para.
No.
Para. Name
Setting Range
Default
Property
AF-09
RPDO2-SubIndex0- L
0x0000 to 0xFFFF
0x0000
☆
AF-10
RPDO2-SubIndex1-H
0x0000 to 0xFFFF
0x0000
☆
AF-11
RPDO2-SubIndex1- L
0x0000 to 0xFFFF
0x0000
☆
AF-12
RPDO2-SubIndex2-H
0x0000 to 0xFFFF
0x0000
☆
AF-13 RPDO2-SubIndex2- L
0x0000 to 0xFFFF
0x0000
☆
AF-14
RPDO2-SubIndex3-H
0x0000 to 0xFFFF
0x0000
☆
AF-15
RPDO2-SubIndex3- L
0x0000 to 0xFFFF
0x0000
☆
AF-16
RPDO3-SubIndex0-H
0x0000 to 0xFFFF
0x0000
☆
AF-17 RPDO3-SubIndex0- L
0x0000 to 0xFFFF
0x0000
☆
AF-18
RPDO3-SubIndex1-H
0x0000 to 0xFFFF
0x0000
☆
AF-19
RPDO3-SubIndex1- L
0x0000 to 0xFFFF
0x0000
☆
AF-20
RPDO3-SubIndex2-H
0x0000 to 0xFFFF
0x0000
☆
AF-21
RPDO3-SubIndex2- L
0x0000 to 0xFFFF
0x0000
☆
AF-22
RPDO3-SubIndex3-H
0x0000 to 0xFFFF
0x0000
☆
AF-23 RPDO3-SubIndex3- L
0x0000 to 0xFFFF
0x0000
☆
AF-24
RPDO4-SubIndex0-H
0x0000 to 0xFFFF
0x0000
☆
AF-25
RPDO4-SubIndex0- L
0x0000 to 0xFFFF
0x0000
☆
AF-26
RPDO4-SubIndex1-H
0x0000 to 0xFFFF
0x0000
☆
AF-27 RPDO4-SubIndex1- L
0x0000 to 0xFFFF
0x0000
☆
AF-28
RPDO4-SubIndex2-H
0x0000 to 0xFFFF
0x0000
☆
AF-29
RPDO4-SubIndex2- L
0x0000 to 0xFFFF
0x0000
☆
AF-30 RPDO4-SubIndex3-H
0x0000 to 0xFFFF
0x0000
☆
AF-31 RPDO4-SubIndex3- L
0x0000 to 0xFFFF
0x0000
☆
AF-32 TPDO1-SunIndex0-H
0x0000 to 0xFFFF
0x0000
☆
AF-33 TPDO1-SunIndex0-L
0x0000 to 0xFFFF
0x0000
☆
AF-34 TPDO1-SunIndex1-H
0x0000 to 0xFFFF
0x0000
☆
AF-35 TPDO1-SunIndex1-L
0x0000 to 0xFFFF
0x0000
☆
AF-36 TPDO1-SunIndex2-H
0x0000 to 0xFFFF
0x0000
☆
AF-37 TPDO1-SunIndex2-L
0x0000 to 0xFFFF
0x0000
☆
AF-38 TPDO1-SunIndex3-H
0x0000 to 0xFFFF
0x0000
☆
AF-39 TPDO1-SunIndex3-L
0x0000 to 0xFFFF
0x0000
☆
AF-40
TPDO2-SunIndex0-H
0x0000 to 0xFFFF
0x0000
☆
AF-41
TPDO2-SunIndex0-L
0x0000 to 0xFFFF
0x0000
☆
AF-42
TPDO2-SunIndex1-H
0x0000 to 0xFFFF
0x0000
☆
AF-43 TPDO2-SunIndex1-L
0x0000 to 0xFFFF
0x0000
☆
AF-44
TPDO2-SunIndex2-H
0x0000 to 0xFFFF
0x0000
☆







































































