








Installation Guide
1
DC Servo Gripper
Installation for SCORBOT-ER 9 Pro
To install the DC servo gripper, follow the procedure below:
1.
Turn on the computer and the USB-Pro controller.
2.
Start Scorbase Pro or Robocell Pro as relevant.
3.
Enter On-line mode by selecting
Options |
On-line
from the menu bar.
4.
Click the
Search Home
button
and verify that the routine is successfully completed.
Note:
The robot must be in the home position for the proper installation of the gripper.
Do not change the position of the robot after it has been homed.
5.
Turn off the controller.
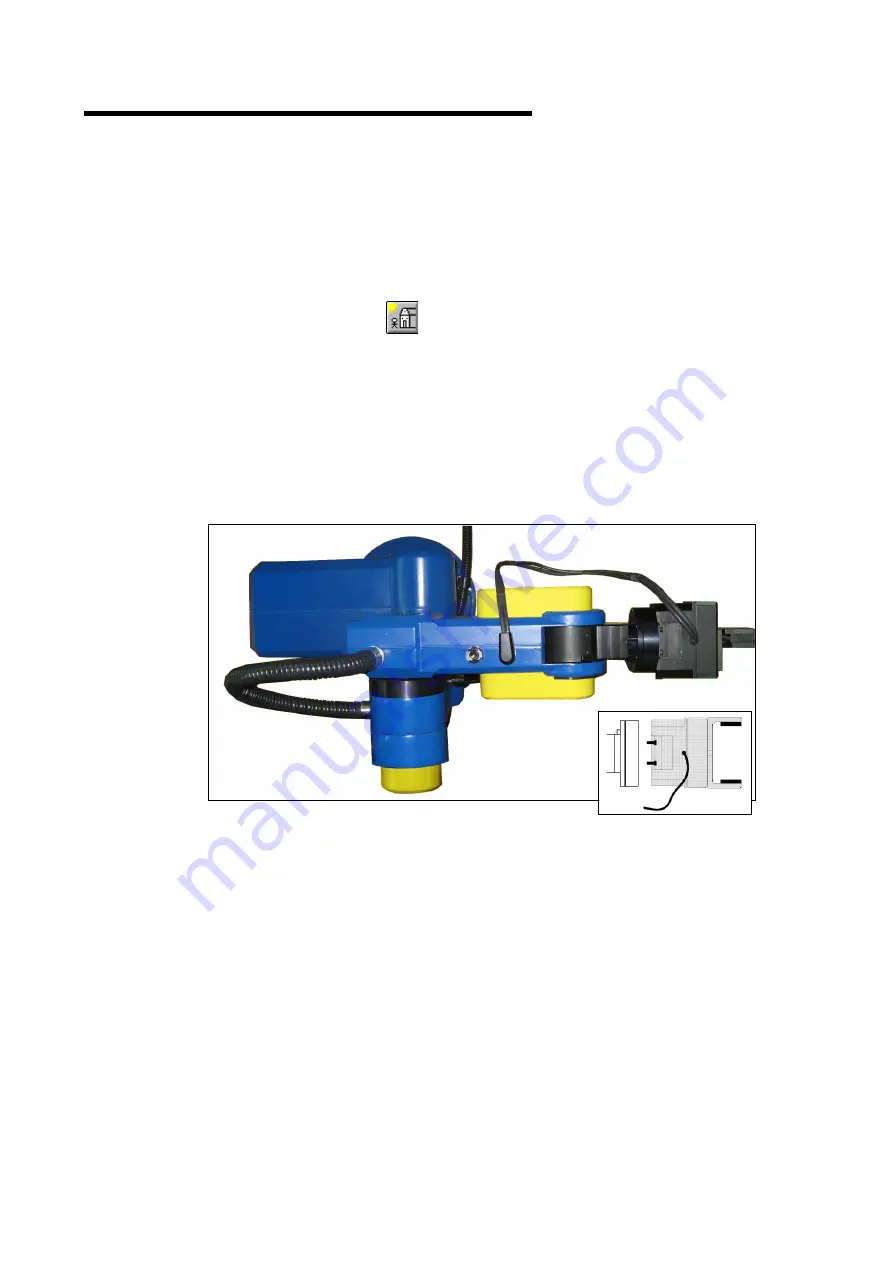
6.
Attach the gripper to the gripper mounting flange at the end of the robot arm using four
M4x10 socket screws and a 3mm Allen key (hex wrench), as shown in the inset in Figure 1.
Figure 1: Attaching Gripper to SCORBOT-ER 9Pro







































































