





























70
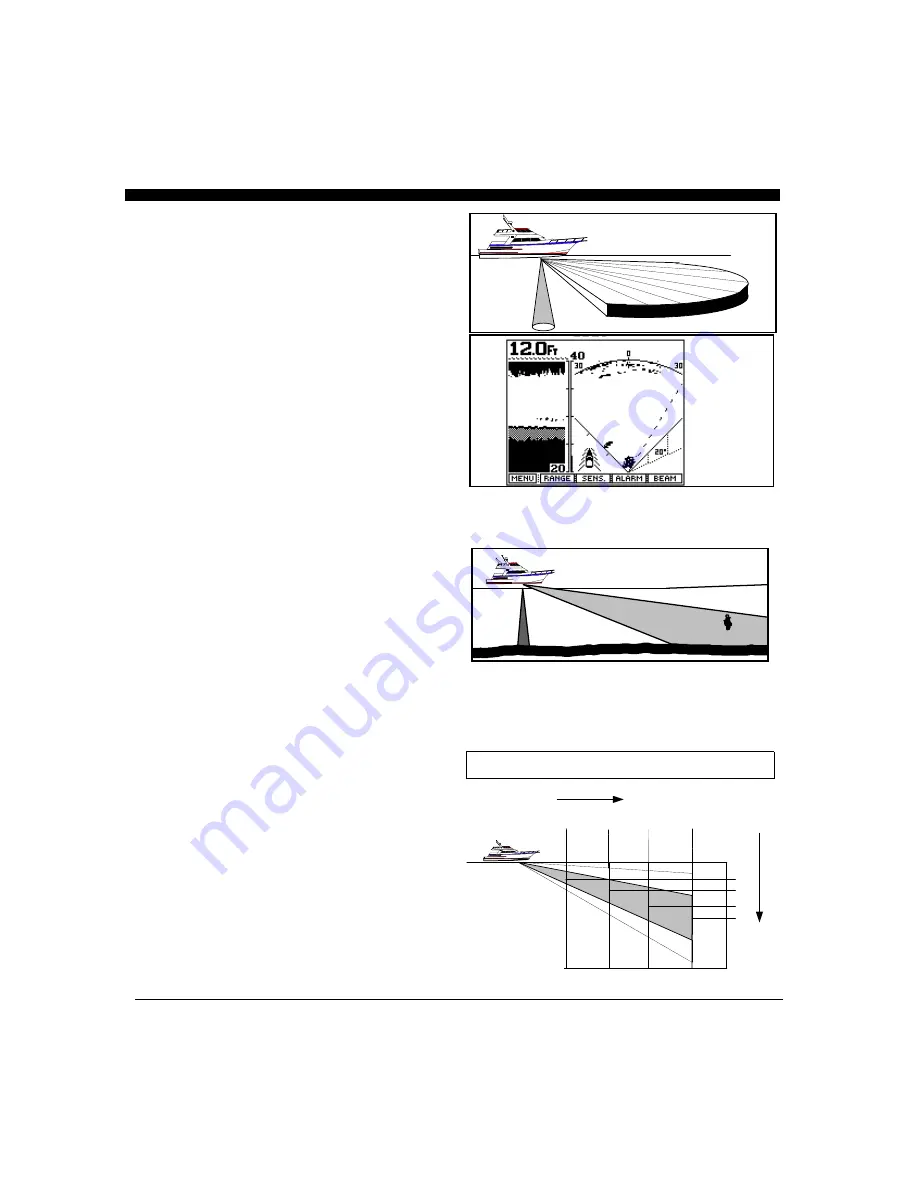
Plane of Forward Scan is Angled 20 Degrees
Downward From Surface. Forward beam will
reach bottom at approx. 3 to 3.5 times the actual
depth of water that you are in.
250
500
750
1000
90
180
270
360
Forward
Depth
Beam Depth at Various Forward Ranges
Beam Depth =
Approx. .36 X
Forward
Distance
at 20 Degree
Interpreting The Twinscope’s
Forward Horizontal (Sea Scout)
Display
In the Horizontal (
Sea Scout
) mode, the Twinscope scans
from left to right across the boats bow. The forward
scanning elements in the transducer are positioned so that
the plane of the horizontal scan is angled downward
approximately 10-20 degrees from the water’s surface
(see sketch at right). This downward angle is designed to
help reduce the effects of surface noise clutter when the
water is choppy and to allow easier mounting of the
transducer to the transom of smaller boats.
As the acoustic sound beam is projected away from the
boat, the cross-sectional diameter of the beam increases.
At a range of approximately 4 to 5 times the depth of the
water, the sound beam will begin intersecting the bottom
and some of the sound energy that intersects the bottom
will be reflected back and appear on the
Twinscope’s
screen as bottom echos.
It is important to understand that the
Twinscope
will
often see the bottom and show it on the forward display.
This display information can be used to help understand
the structure of the bottom ahead of the boat, but the
bottom echos can also mask or be confused as fish targets.
Several forward display situations with comments are
shown on the following page.
Summary of Contents for Color Twinscope
Page 1: ...1 OPERATION MANUAL INTERPHASE INTERPHASE TWINSCOPE...
Page 83: ...83 Notes...
Page 84: ...84...
Page 86: ...86...
Page 88: ...88...





















































