





























Goodrive350 IP55 High-ingress Protection Series VFD
Basic Operation Instructions
-45-
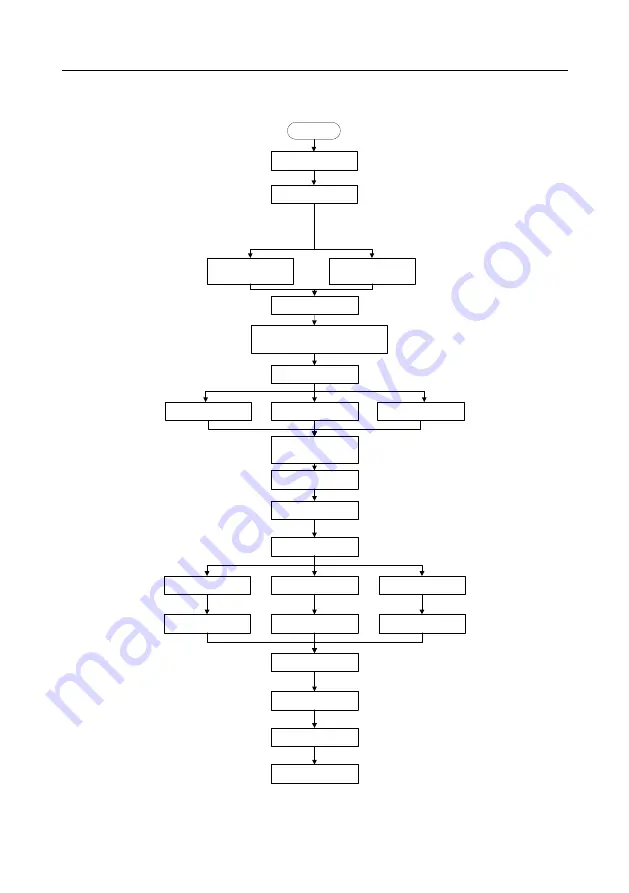
5.5.2 Common commissioning procedures
The common operation procedures are shown below (take motor 1 as an example).
Start
Power up after confirming the
wiring is correct
Restore to default value
(P00.18=1)
Set the motor parameters of
P02.01
–
P02.05 as per the
motor nameplate
Set the motor parameters of
P02.15
–
P02.19 as per the
motor nameplate
Press QUICK/JOG to jog
If the motor rotates in wrong direction, power off
and exchange the motor wires of any two phases,
and power on again
Set autotuning mode
(P00.15)
Complete parameter rotary
autotuning
Partial parameter rotary
autotuning
Start autotuning after pressing
RUN key, and stop after
autotuning is done
Set running frequency
Set speed running control
mode (P00.00)
SVC 1 (P00.00=0)
SVC 2 (P00.00=1)
SVPWM control mode
(P00.00=2)
Set vector control parameters
in P03 group
Set vector control parameters
in P03 group
Set V/F parameters in P04
group
Set start/stop control
parameters in P01 group
Run after running command
Stop after stop command
End
Set running command channel
(P00.01, P00.02)
Complete parameter static
autotuning
Asynchronous motor
Synchronous motor
Note:
If fault occurred, rule out the fault cause according to "fault tracking".







































































