





























MH860 series hydraulic servo drive
Operating through the LED panel
54
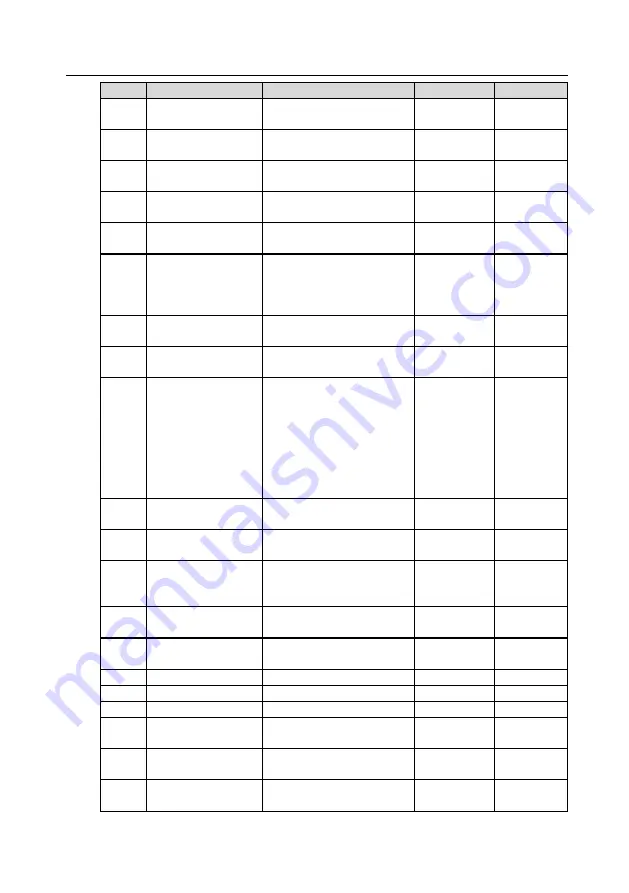
Code
Definition
Range
Default
Unit
F016
Pressure feedback
gain
[0,32767]
8182
-
F017
Pressure reference
rise slope
[0,32767]
16000
0.007629
bar/ms
F018
Pressure reference
fall slope
[0,32767]
16000
0.007629
bar/ms
F019
Pressure proportional
gain 0
[0,32767]
13000
-
F020
Pressure integral gain
0
[0,32767]
100
-
F021
RS485
communication baud
rate
0: 9600bps
1: 19200bps
2: 38400bps
3: 57600bps
0
-
F022
Pressure proportional
gain 1
[0,32767]
13000
-
F023
Pressure integral gain
1
[0,32767]
100
-
F024
RS485
communication parity
method
0: (N,8,1)
1: (E,8,1)
2: (O,8,1)
3: (N,8,2)
4: (E,8,2)
5: (O,8,2)
0
N: No parity
bit
E: Even
parity
O: Odd parity
8-bit data.
1 or 2 stop
bits.
F025
Pressure proportional
gain 2
[0,32767]
13000
-
F026
Pressure integral gain
2
[0,32767]
100
-
F027
RS485
communication
address
[1,127]
10
-
F028
Pressure proportional
gain 3
[0,32767]
13000
-
F029
Pressure integral gain
3
[0,32767]
100
-
F030
Reserved
[0,32767]
0
-
F031
Pump displacement [0,32767]
100
mL/r
F032
Pump leakage
[0,1.00]
0.00
L/min/bar
F033
Max. speed for pump
reverse run
[0,-6000]
-300
rpm
F034
Max. motor rotation
speed
[0,6000]
2200
rpm
F035 DC voltage calibration
[0,800] (Only slight change
allowed)
DC voltage at
menu access
V







































































