














TECHNICAL
MANUAL Drive 2000 Mini Evo
October 2016-Rev. 1
6
User's inputs / outputs
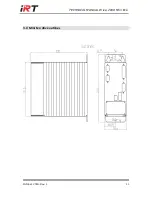
A - Control unit 2115
Ethercat ® or Profinet ®
USB port for programming and diagnosis.
External power supply to the Control and Interface boards to keep position data
and alarms in case of main power supply interruption.
B - Control unit 2001
Analogue Speed or Current input c/- 10V
Digital input command.
Pulse/Dir
SSI command interface
RS232 serial port and RS485 serial port for multi axis
controller system.
Limit switches for overrun protection in both
directions.
External power supply to the Control and Interface
boards to keep position data and alarms in case of
main power supply interruption.
CNC feedback virtual encoder 1024 PPR
Ready relay
With Add-on boards:
CAN interface
24VDC auxiliary supply
Encoder motor feedback
Dual Analogue bipolar output
Profile (motion control by PLC 24V logic)







































































