





























JAKA Zu
®
7 - V1.1 15
3 Mechanical Interface
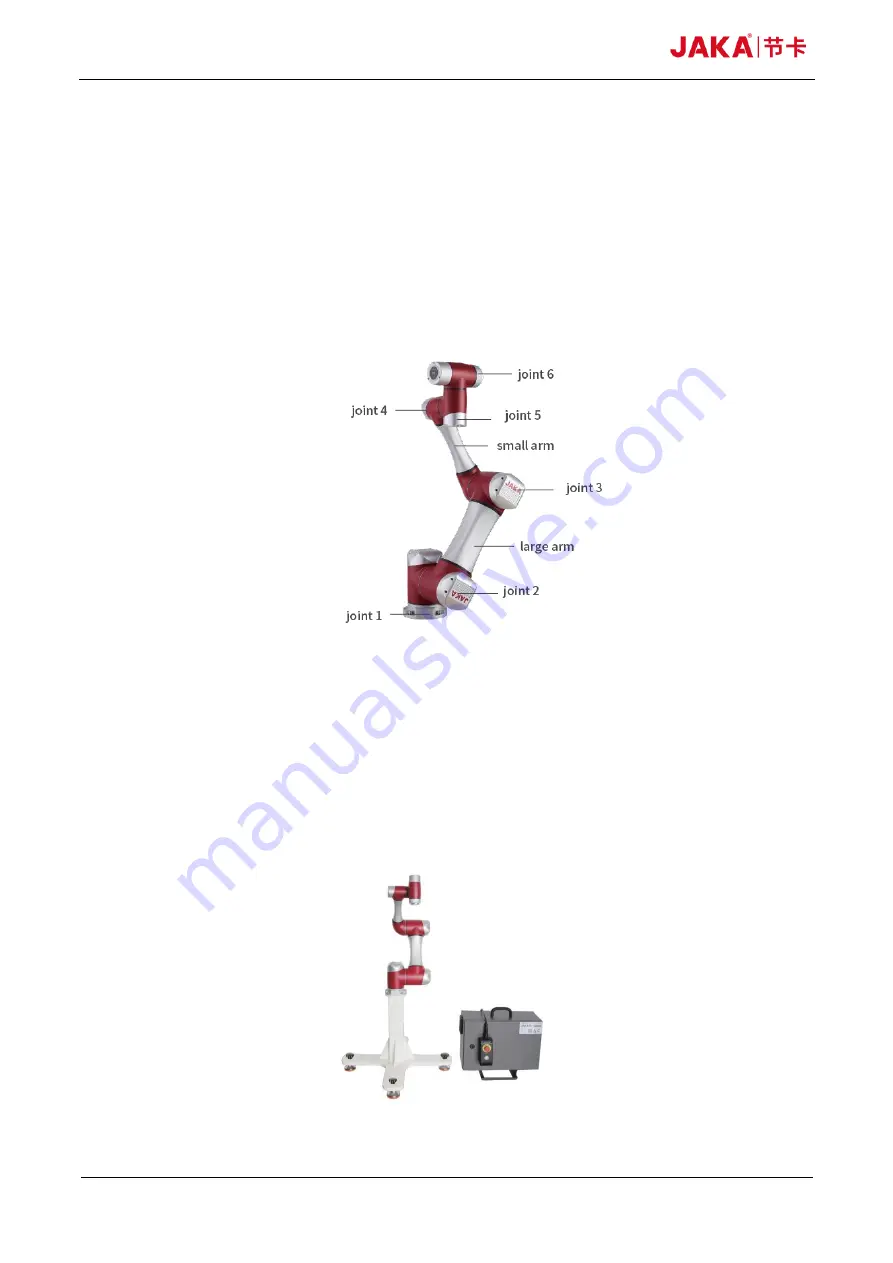
The robot consists mainly of six joints and two aluminum tube arms (as shown in Fig3-1). The base is used
to install the robot, and the tool end is used to mount the tool. The tool can perform translational and rotational
movements in the robot's working range. The following sections describe the basics to be aware of the
installation of various components in the robot system.
Fig3-1
3.1 Robot Working Range
3.1.1 Robot Dimensions
The photo and dimensions of JAKA Zu 7 robot are shown in Fig 3-2 and Fig3-3. Make sure to take into
account the working range of the robot during installation to avoid injury to people or damage to the equipment.
Fig 3-2







































































