




















JAKA Zu
®
7 - V1.1 54
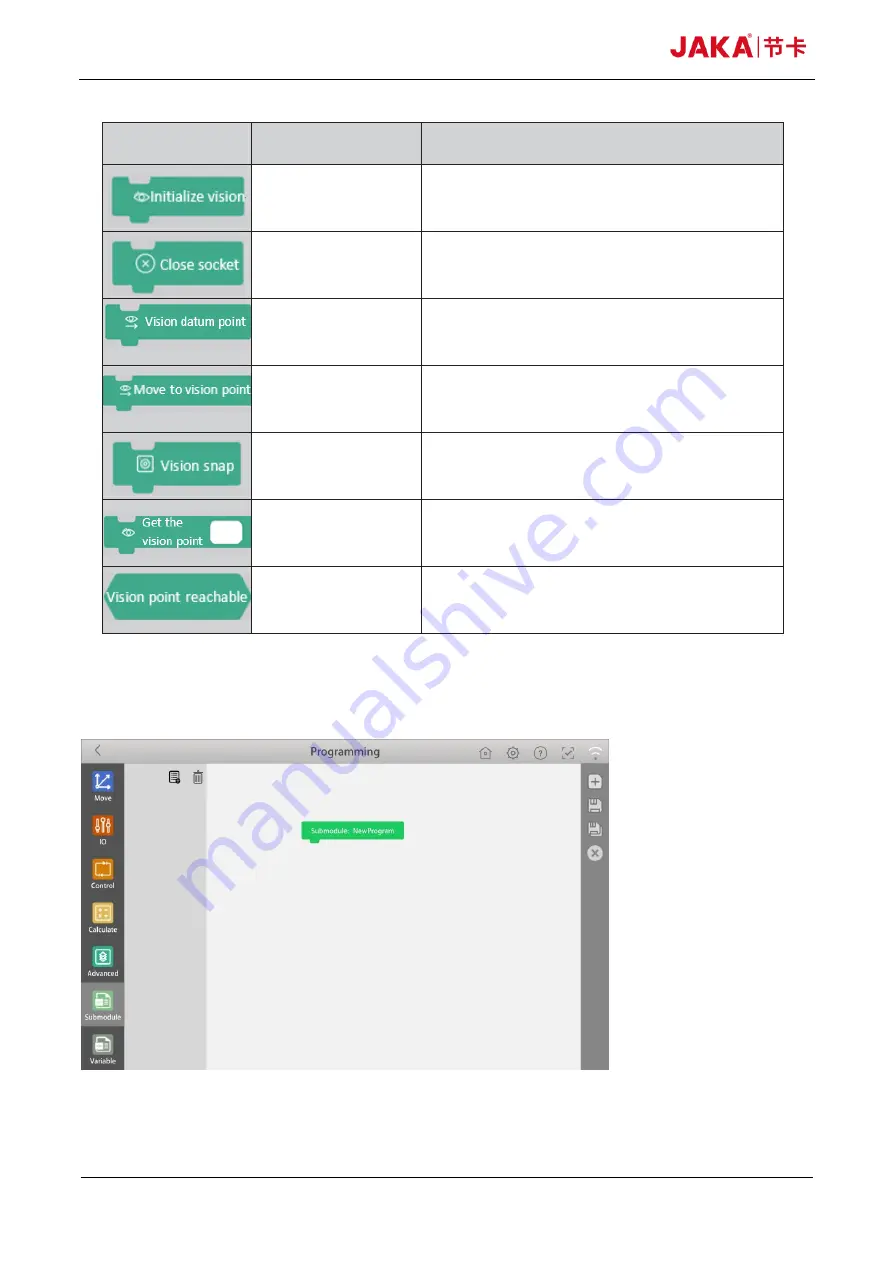
Icon
Name
Function
Vision initialization
Command to initialize the vision
Vision shut down
Close the current visual program
Vision basic point
The reference position where the workpiece is
grabbed, with which the camera calculates the offset
of the workpiece from the basic point.
Move to vision point
According to the visual feedback, the fixture at the end
calculates and moves to the position of the workpiece.
Visual photo-taking
Trigger camera to take photos of workpiece and collect
data.
Get the vision point
Get the vision and grab the position of some point.
Reachable vision position
Judge whether the robot can reach the position the vision
reached.
Fig 10-32
Submodule
Fig 10-33
“Submodule” command can deposit the program parts needed in various places. The submodule can be




































































