




























38
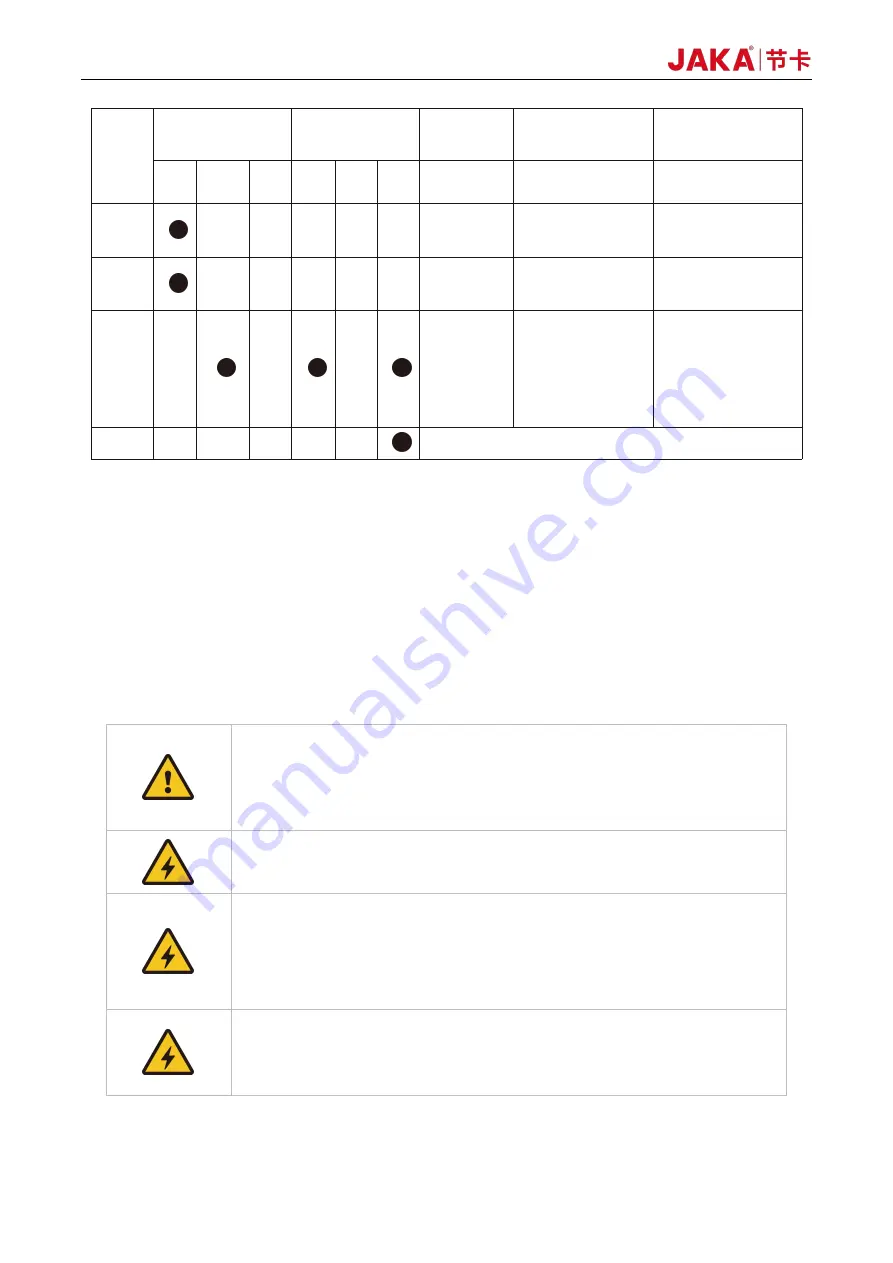
Verification
number
Inspection cycle
Maintenance
Inspecting
Parts
Inspecting Content
Inspection/process
ing method
Daily
Every 3
months
Every 1
year
4 year 5 year 8 year
1
Surfaces
Whether there is
splashes, dust, etc.
Visual confirmation,
cleaning
2
Filters
Whether there is dirt or
blockage
Visual confirmation,
cleaning, replacement
3
Cables
Confirm whether there
is any damage or
fragmentation
•Confirm whether the
connectors are loosed.
Visual confirmation,
tightening. Replace the
cable when it is
obviously damaged.
4
Overhaul
(P.S.) Use a soft cloth to remove dusts when cleaning. Do not blow off dust with equipment such as air
blowers. Wind pressure will cause the dusts to enter the inside of the fan and the blades rotate at a speed
exceeding the rated speed, which may cause the fan to malfunction or affect its life. Only use the vacuum
cleaner on the blade section. Do not vacuum the rotating part or the main body, which can cause the fan to
malfunction or reduction of the fan’s service life.
5.3 Parts Replacement and Preservation
When replacing the parts of the robot control unit, please observe the following precautions and work
safely.
1
、
Do not carry out any modification of our products.
2
、
Fire, malfunction, and wrong movements caused by modification may result
in personal injury or damage to the robot.
3
、
Any loss caused by the user's own modification of JAKA's products is not
covered by JAKA’s warranty.
1
、
To prevent electric shock, when replacing parts, please turn off the circuit
breaker, and then turn off the main power supply.
1. Turn off the main power, wait for 5 minutes, and then the parts could be
replaced if needed.
2. There is a risk of electric shock, due to residual charge in the electronic
components.
3. Do not use wet hands for work.
4. In case of electric shock, it will result in serious injury or death.
1. 1.The replacement must be carried out by the specified operator.
2. 2.Electric shock or being caught by a robot accidentally can result in serious
injury or death.
JAKAZu 5







































































