




























10
Force Control Products
2. Hardware Installation
2.1.
JAKA Zu Se Hardware Installation
2.1.1.
Type I Force Sensor
2.1.1.1 Overview
The strain-type six-axis F/T sensor can measure the forces and torques in 3 directions simultaneously. The
sensor senses relative deformation between the "tool end flange" and the "main body" caused by the force
exerted on it, and then measures the change in its elastic element with a resistance strain gauge. The sensor
contains a high-precision and highly-responsive embedded system, which can acquire and analyze changes
in signals from the resistance strain gauge as well as output the magnitude and direction of the applied force
in real time. Please install the sensor properly so as not to interfere with the output quality.
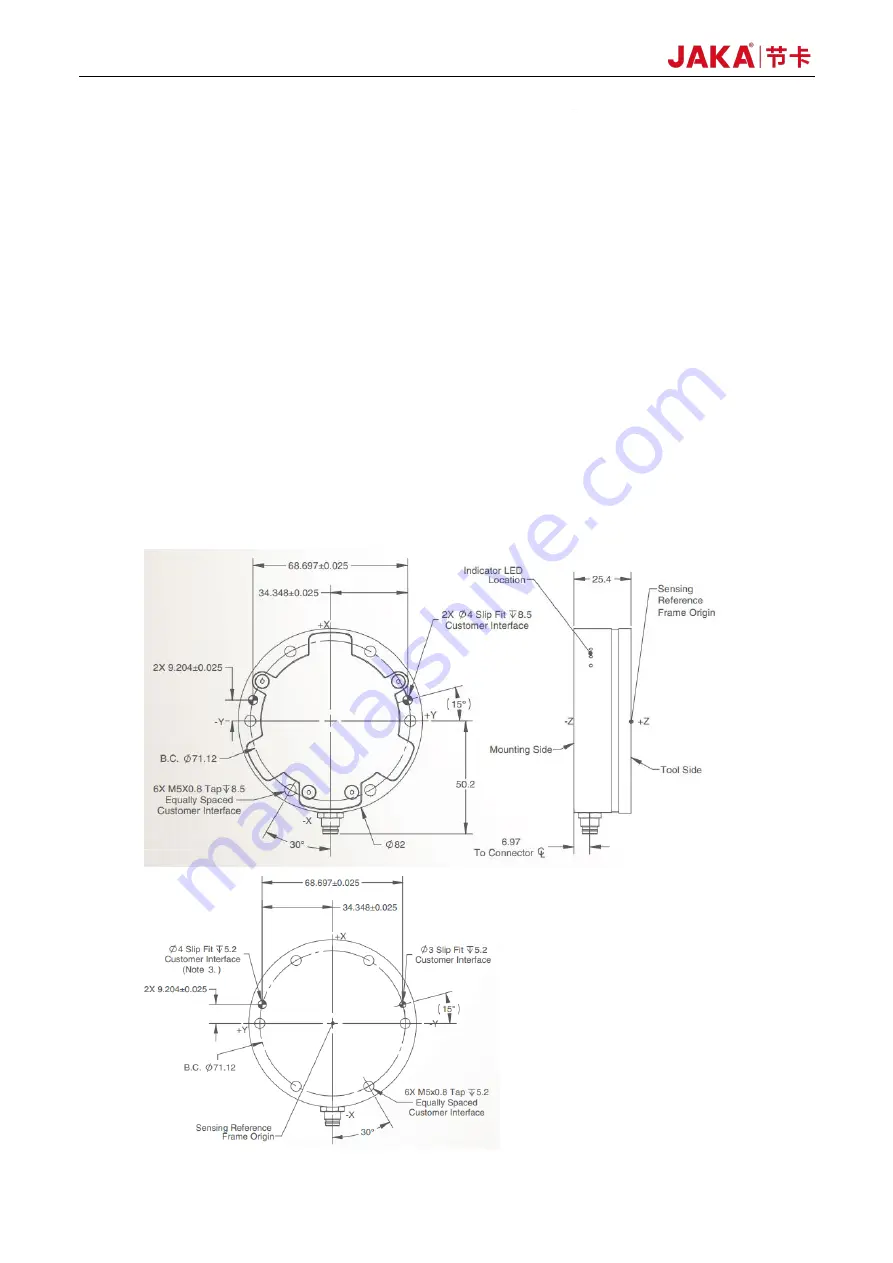
2.1.1.2 Sensor Installation
The mounting holes and dimensions of the sensor are shown in Figure 2-1.
Summary of Contents for Zu Series
Page 1: ...JAKA ROBOTICS Force Control Products JAKA Se and JAKA Sp...
Page 3: ......
Page 4: ......
Page 17: ...Version 3 1 0 13 M3 2 0 M4 4 0 M5 8 0 M6 13 0 M8 35 0...
Page 41: ...Version 3 1 0 37 Figure 2 36 Installation and Dimensions of the Force Sensor Indicator light...
Page 61: ...Version 3 1 0 57 Figure 3 8 Force Display Interface of the App...
Page 75: ...Version 3 1 0 71 Figure 3 19 Force Display Interface of the App...
Page 79: ...Version 3 1 0 75 Figure 3 21 Collision Detection Function Settings of JAKA Zu Sp...




































































