





















Version: 3.1.0
69
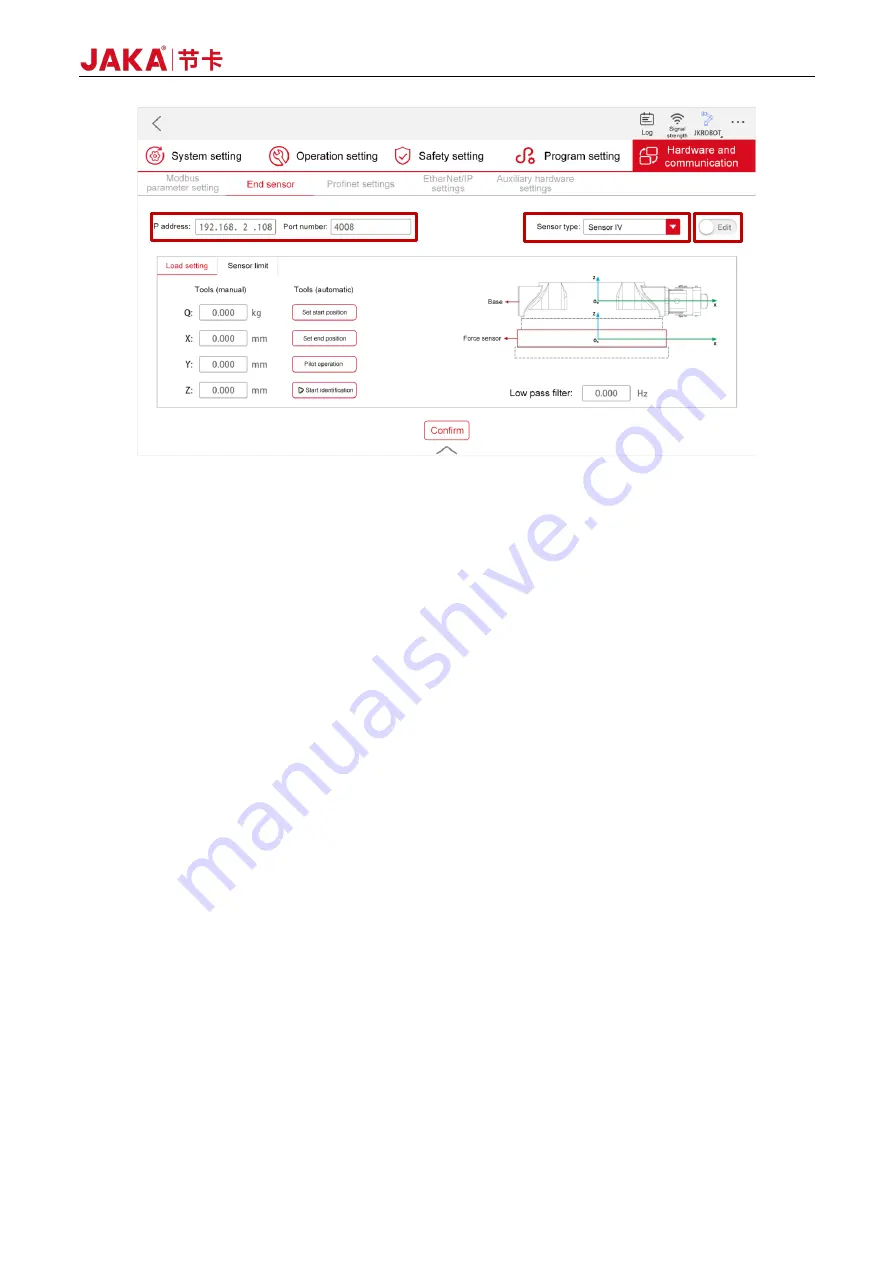
Figure 3-18 Sp System Configuration Interface (IV Base Type)
e.
Turn on the robot CAB, open the JAKA Zu app, connect the robot to the app, and power on the robot;
f.
As shown in Figure 3-18, tap [Settings] at the upper right of the Home page, and then tap [Hardware
and communication] → [End sensor] to enter the sensor configuration interface;
g.
In the sensor configuration interface, select the sensor type IV, set the IP to 192.168.2.108 and the port
number to 4008, and tap [Confirm];
h.
Set the load parameters: Tap [Settings] → [Hardware and communication] → [End sensor] → [Load
setting], and tap the input box under the [Tools (manual)] bar on the left to manually input the mass and
centroid position of the end tool connected to the sensor;
i.
Tap the toggle switch at the upper right of the interface to change its status from [Edit] to [Run], and the
sensor can be turned on normally;
j.
Open the "Manual operation" page, tap [Configure], check [Do not initialize], tap [confirm], and close the
page. Then tap the [View] button on the right, turn on all the toggle switches (Fx, Fy, Fz, Mx, My, Mz,
and real-time). Slightly push or pull the sensor. If the graph fluctuates, the sensor communication is
normal. At this point, the sensor is basically set up.
Note: If the communication fails, please check whether the sensor hardware is in good condition and
whether the wiring and configurations are correct. Then restart the sensor and the robot as follows: Power
off the sensor → unplug the network cable → power off the robot and the CAB → plug the network cable
into the corresponding interface on the CAB → power on the sensor → turn on the CAB → redo the
configurations. If the problem persists after restarting, please contact us. Any unauthorized attempt to
disassemble and repair the sensor, robot, CAB or cable is NOT allowed.
Summary of Contents for Zu Series
Page 1: ...JAKA ROBOTICS Force Control Products JAKA Se and JAKA Sp...
Page 3: ......
Page 4: ......
Page 17: ...Version 3 1 0 13 M3 2 0 M4 4 0 M5 8 0 M6 13 0 M8 35 0...
Page 41: ...Version 3 1 0 37 Figure 2 36 Installation and Dimensions of the Force Sensor Indicator light...
Page 61: ...Version 3 1 0 57 Figure 3 8 Force Display Interface of the App...
Page 75: ...Version 3 1 0 71 Figure 3 19 Force Display Interface of the App...
Page 79: ...Version 3 1 0 75 Figure 3 21 Collision Detection Function Settings of JAKA Zu Sp...







































































