















Setup
Desktop Robot JR3000
PREFACE
The Janome Desktop Robot JR3000 Series are new, low-cost, high-performance robots. With these
robots we succeeded in reducing the price while maintaining functionality. The combined use of
stepping motors and specialized micro step driving circuits saves both energy and installation space.
This manual covers the JR3200, JR3300, JR3400, JR3500* and JR3600* series (*under
development). There are several manuals pertaining to these robots.
JR3000 Series
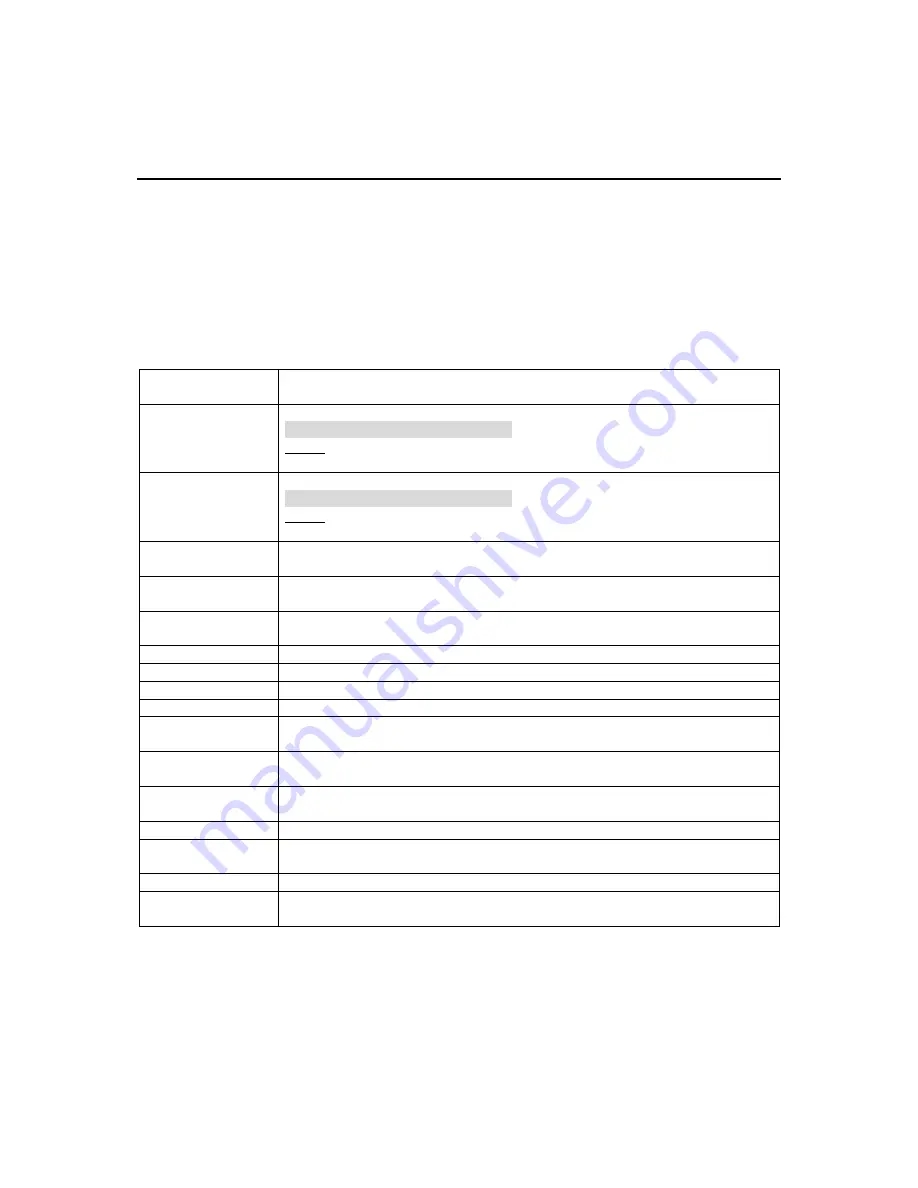
For Your Safety
This is important safety information. Make sure you read this before using the
robot.
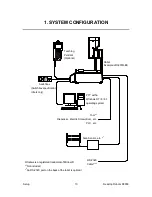
Setup
Explains how to set up the robot.
■
Make sure you read this manual
■
NOTE: This manual is designed for people who have received safety and
installation training regarding the robot.
Maintenance
Explains maintenance procedures for the robot.
■
Make sure you read this manual
■
NOTE: This manual is designed for people who have received safety and
maintenance training regarding the robot.
Basic Instructions
Provides part names, data configurations, and the basic knowledge
necessary to operate the robot.
Quick Start
Explains the actual operation of the robot by creating and running simple
programs.
Teaching Pendant
Operation
Explains how to operate the robot via the teaching pendant.
Functions I
Explains point teaching.
Functions II
Explains commands, variables, and functions.
Functions III
Explains functions such as All Program Common Settings and PLC programs.
Functions IV
Explains Customizing Functions.
External Control
(I/O / Fieldbus)
Explains I/O and Fieldbus.
Please refer to this manual if you are using Fieldbus.
Communication
Control (COM/LAN)
Explains COM 1 – 3 and LAN communication control.
Camera & Sensor
Functions
Explains the functions of the attachable camera and Z position sensor.
Specifications
Outlines general specifications such as the robot’s operating range, mass etc.
Auxiliary Axis
Functions
Explains the auxiliary axis functions.
PC Operation
Explains how to use the PC software JR C-Points II.
Application
Specifications
Explains the specialized functions of the various application specifications.
Note: The content of this manual may differ from the robot in your possession due to updates to the
product specifications.
The descriptions within this manual are based on standard specifications. The menu item names etc.
may vary depending on the model type.
1






































































