


























Setup
Desktop Robot JR3000
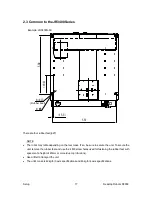
2.6 Connecting to a PC (Ethernet)
To back up the robot’s C&T data and to upgrade the robot’s system software, connect the robot and a
PC via Ethernet and make sure the PC and robot are able to interface.
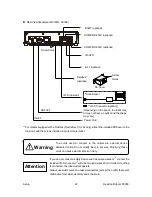
Ethernet Overview
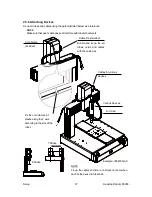
The robot is fitted with an Ethernet connector (10/100BASE-TX) by standard. The LAN port is on the
front of the robot. By using Ethernet to transmit commands and data from a PC, you can use functions
such as the following:
1. Send and receive C&T data
2. Overwrite the system program
3. Online teaching such as JOG and GO movements etc.
4. Monitor functions such as external I/O and Fieldbus I/O display etc.
5. Set online settings such as administration settings and teaching environment settings etc.
6. Display robot information such as system information and error history etc.
If using Ethernet, you can connect to and use multiple robots with one PC via a hub.
With the PC software (JR C-Points II Limited Edition, or JR C-Points II) you can use functions such as
the following:
1. Back up C&T data
2. Upgrade system software
3. Restore all data for when replacing printed circuit boards
For further information, refer to the operation manual
PC Operation
.
Caution
If you instruct an urgent stop from a network other than I/O-SYS, it
takes a few moments for the robot to actually stop after the
command is sent.
28




































































