























Setup
Desktop Robot JR3000
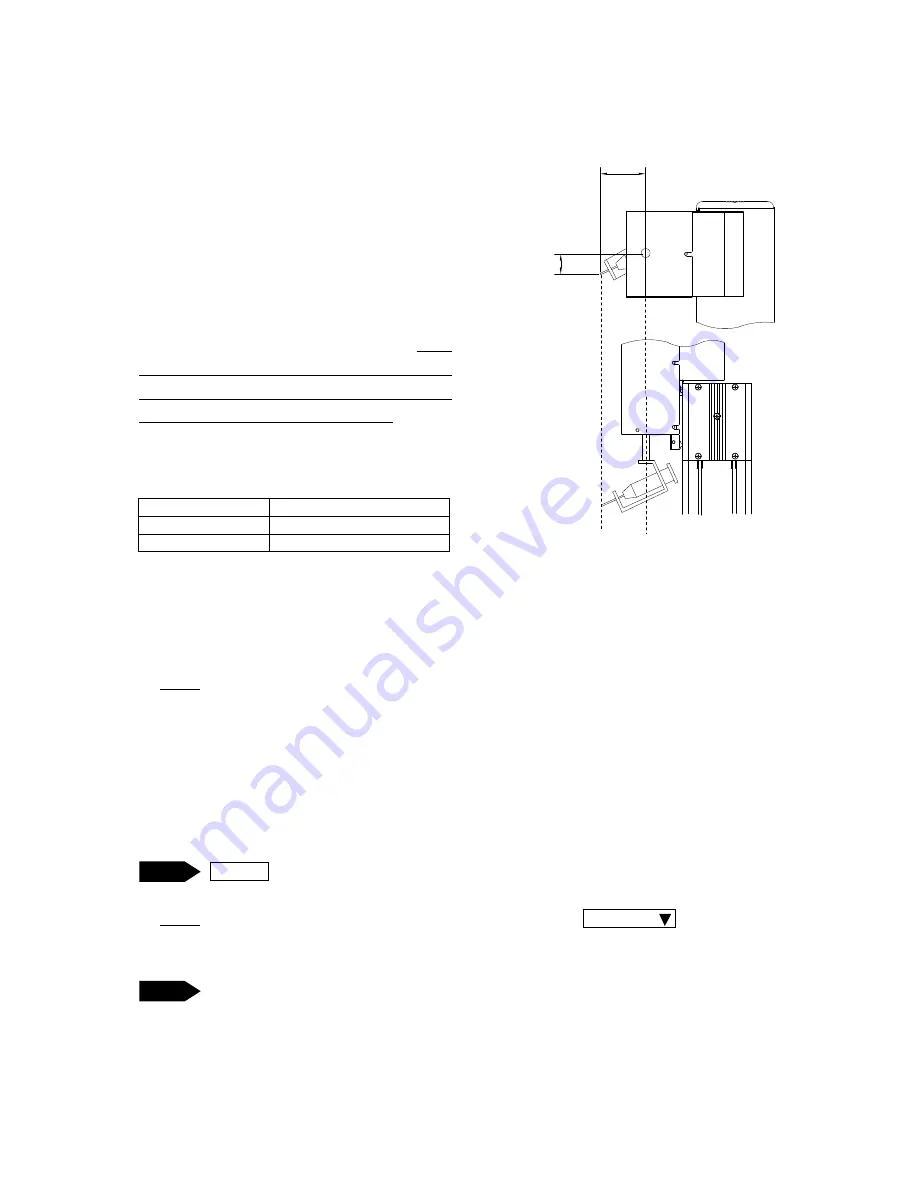
TCP-X, TCP-Y
The TCP (tool center point) is the X and Y
direction distance from the R axis center to the
tool tip.
With [Direct TCP-XY Setting], you can
automatically calculate and set the [TCP-X] and
[TCP-Y] values by indicating the same point twice
with the tool tip (from different R-axis angles).
For 4 axes specifications, make sure to set tool
data (TCP-X, Y) before teaching programs. If you
perform program teaching etc. without setting tool
data, you will have to repeat teaching all of the
coordinates whenever you change tools.
If the tool tip exceeds the acceptable moment of
inertia, a position error may occur.
Tool Tip Moment of Inertia
JR3200
65kg/cm2
JR3300, JR3400
90kg/cm2
TCP-
∆
Z
After changing the tool etc., if the tool tip height is different from the registered tool center point position,
enter the Z-direction difference to TCP-
∆
Z.
NOTE
When adding a new program, the values for the default all program common settings (customizing
data) are entered as program data default values.
Additionally, when using the additional function data [Tool Data], you can change tool data at intervals
between specific points. For example, it is possible to change the registered tool mass settings for only
the period of time it is gripping something.
MENU [Individual Program Settings]
[Tool Data]
NOTE: When the bottommost item shown is highlighted, press the CURSOR key to display
the other settable items for that point.
[Program]
Æ
[Individual Program Settings]
Æ
[Tool/Workpiece]
Æ
[Tool Data]
TP
PC
TCP-Y
TCP-X
Top View
Side View
Tool Tip
R Axis
Center
42





































































