





























Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
60
EXECUTION FLOW CONTROL
■
Subroutine Call for Jobs according to Point Types: callBase
If you set point job data to a point where the user-defined point type created in the Customizing mode
is already set, the point job set under the user-defined point type will not be performed.
For example, If you add a new point job to a point where the point type [Wait Start Point] is already set,
the job originally set to the point will be ignored (the tool unit does not stand by until the start switch is
pressed or a start signal comes on at the [Wait Start Point]) and the newly added job will be performed
instead.
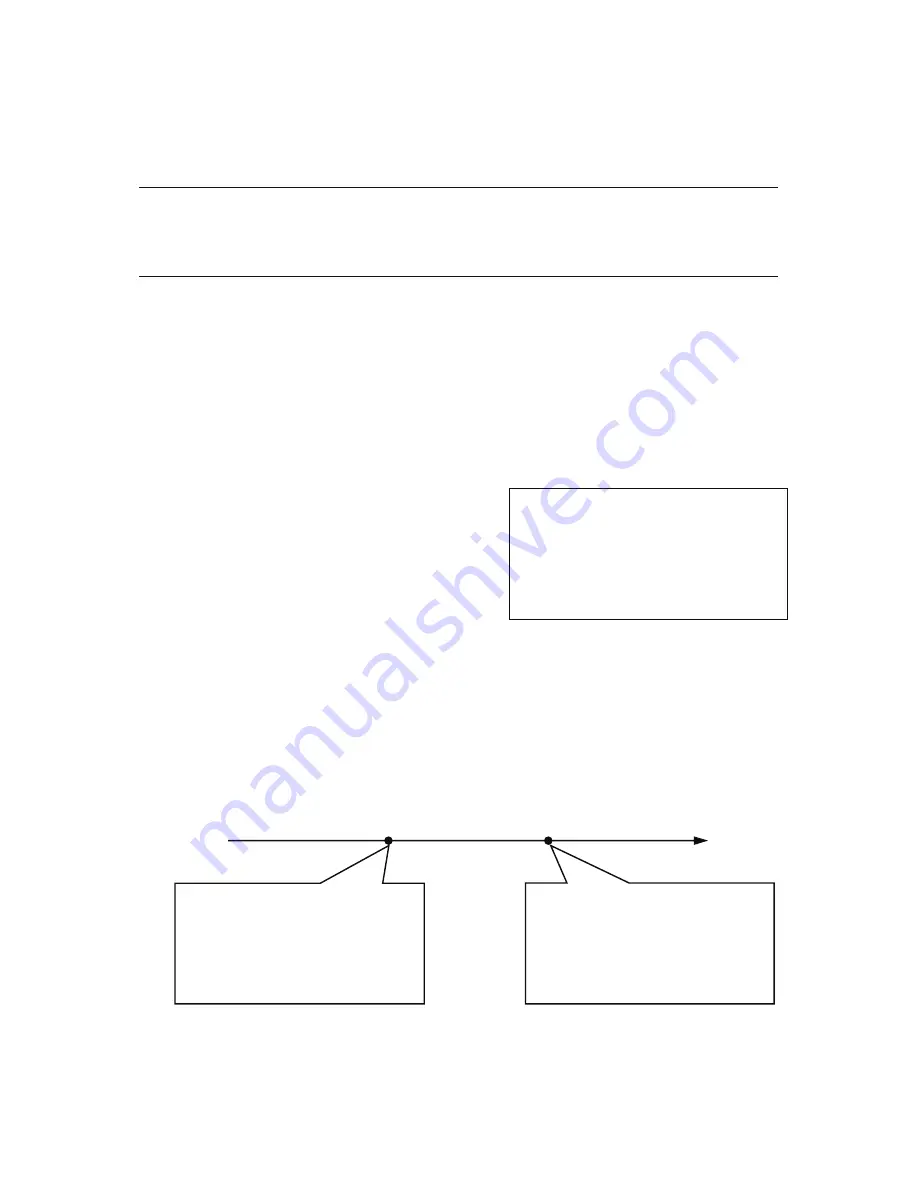
e.g. At Points P1 and P2 where the user-defined point
type shown to the right is set, the following point job
data will be performed at each point:
(P1) Job before Moving
: Point job data 5
Job while Moving
: Point job data 6
Point Job
: Point job data 7
(P2) Job before Moving
: [Job before Moving] set under the user-defined point type
Job while Moving
: [Job while Moving] set under the user-defined point type
Point Job
: [Point Job] set under the user-defined point type
Title :
Pick-up
point
Base type
: PTP Point
Job before Moving
: Yes
Job while Moving
: Yes
Point Job
: Yes
P1
P2
Point 02
Type: Pick-up point
Job before moving No.: 0 (No job)
Job while moving No.: 0 (No job)
Point job No.: 0 (No job)
Point 01
Type: Pick-up point
Job before Moving No.: 5
Job while Moving No.: 6
Point Job No.: 7































































