


















15
VIII.
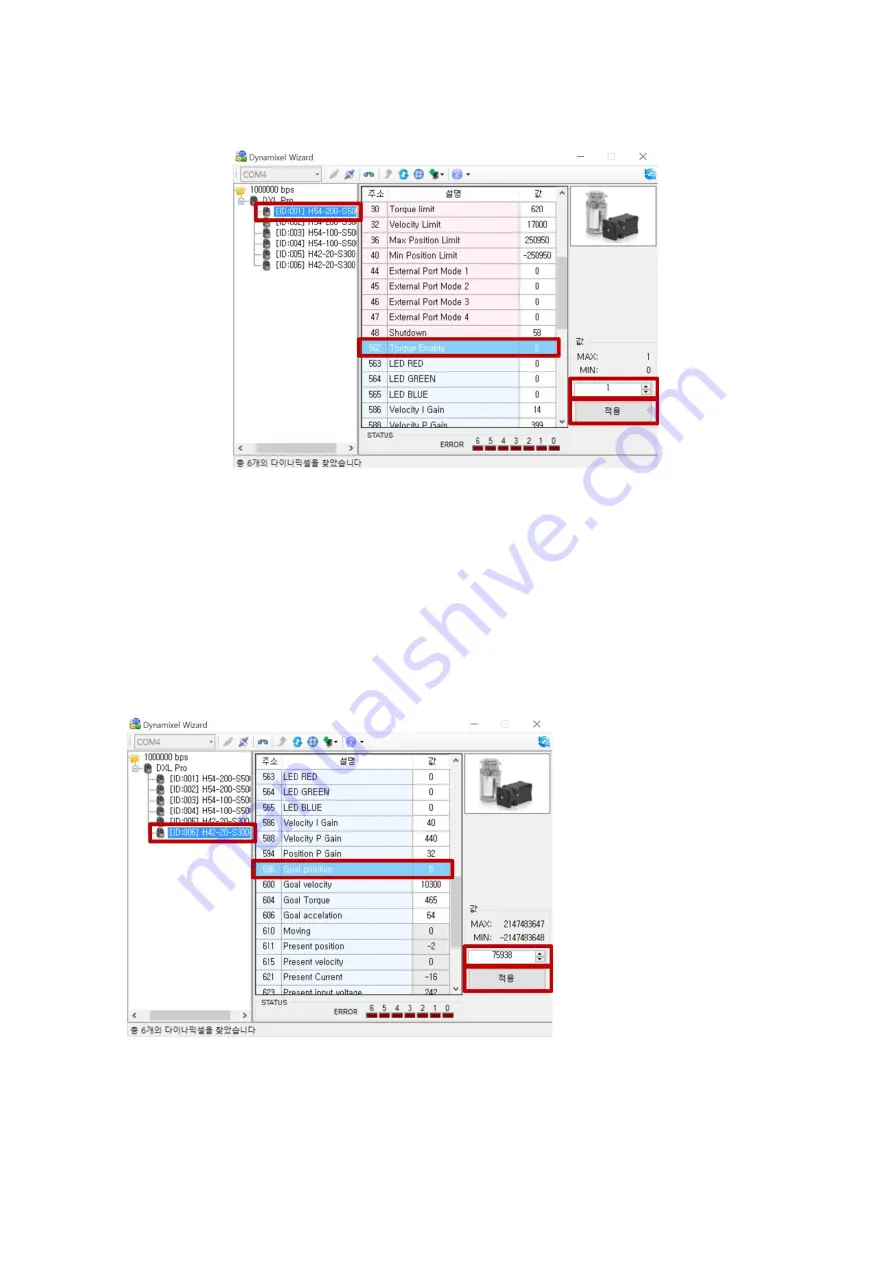
After checking that all the settings for the Dynamixel PROs are set to
“1” for ‘Torque Enable,’ make sure the Manipulator is fixed to the plate. Then
click on the Dynamixel with ID #6.
IX.
Now let’s verify whether the properly moved to the set Goal Position. Joint #6
which is closest to the End Effector is safest to move and test. Set the Goal
Position of joint #6 to about 90 degrees. The position value for joint #6 (H42-
20-S300-R) for 90 degrees is 75938). Please refer to the User Manual for more
information on the Resolution for the Joint Position.
X.
Once the Goal Position is set to 90 degrees, check if the Manipulator has
actually moved 90 degrees from its starting point.
www.jingtianrobots.com






































































