














19
3.2.1
How to Use SimplePtoP
The movement of this example is very fast. When testing this example, please
keep a safe distance away from the Manipulator and be preprared to shut down
the power in case anything goes wrong.
I.
Before running SimplePtoP, you must start a new project to execute the
example then press the Ctrl + F5 key.
II.
Input the Com port number and Baud number. For baudrate 1Mbps, the Baud
number is 3. For more information on the Baud number, please refer to the
eManual.(
http://support.robotis.com/ko/product/dynamixel_pro/control_table.ht
III.
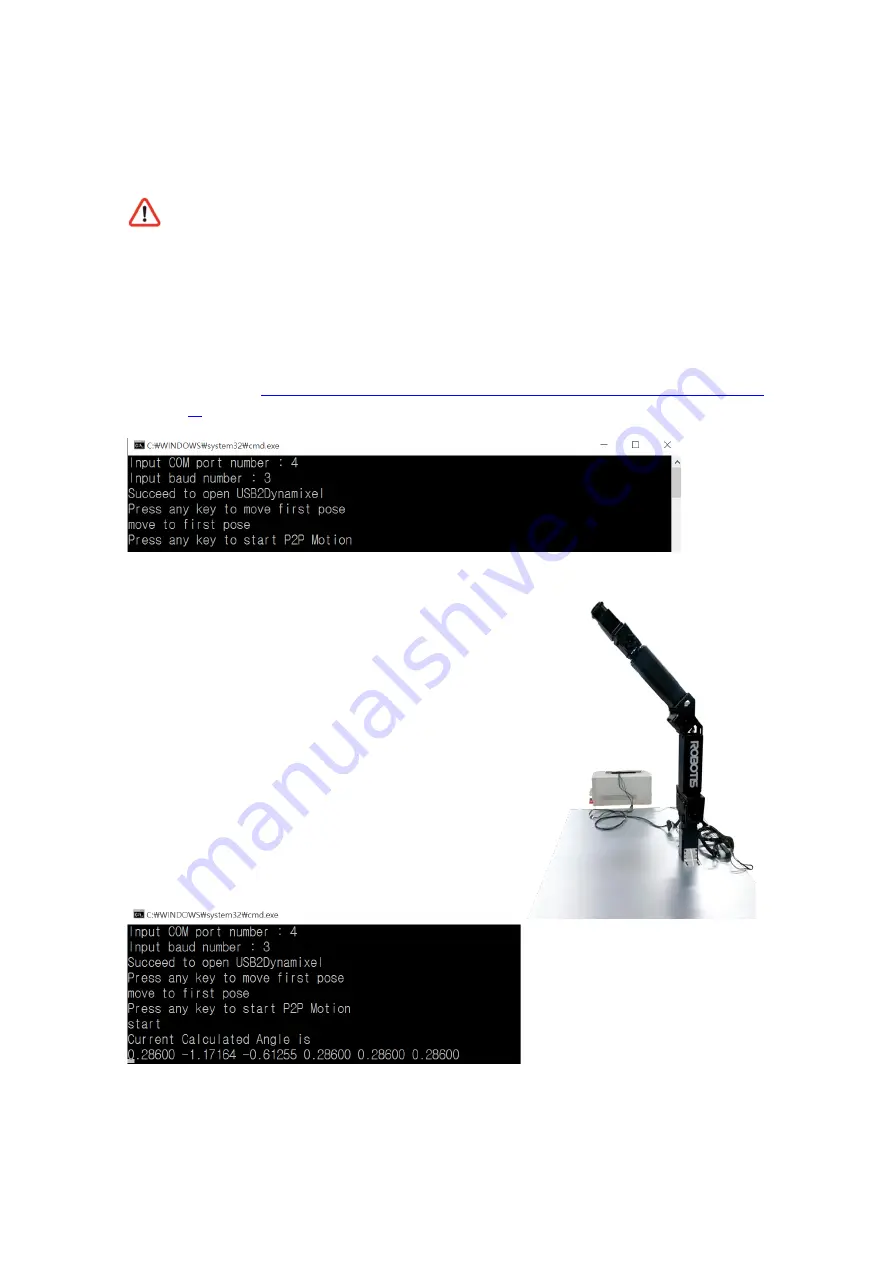
Once input for both numbers is successful,
you
will
see
‘Succeed
to
open
USB2Dynamixel.’
Then you will see
‘Press
any key to move first pose,’
press any key
to move to the Manipulator to its first pose.
Press again any key to start the saved PtoP
Motion once it completes its first pose.
The photo on the right side is the first pose.
IV.
Prints the joint’s position (rad) starting from
the left from ID #1~#6 while using the
SimplePtoP
program.
When
running
SimplePtoP, press ‘p’ or “P’ to pause the
Motion and ‘ESC’ to end the program.
V.
www.jingtianrobots.com







































































