

























43
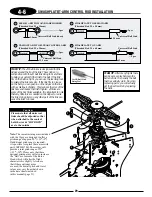
The JR 120°/140° three servo CCPM relies on the radio’s
special CCPM swashplate mixing, rather than a conventional
mechanical mixer that is utilized to achieve the same results.
The radio’s 120° or 140° 3-servo CCPM function auto-
matically mixes the three servos to provide the correct mixing
inputs for aileron (roll), elevator (pitch), and collective. The
following is an example of how each control input affects the
servo’s movement.
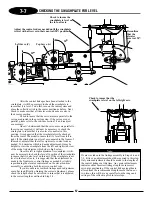
1. COLLECTIVE
When a collective pitch input is given, all three servos
(A, B, and C) move together in the same direction, at equal
amounts, to raise and lower the swashplate while keeping the
swashplate level. During this function, all three servos travel
at the same value (100%) so that the swashplate can remain
level during the increase and decrease in pitch. As mentioned,
this mixing of the three servos is achieved through the radio’s
CCPM program.
2. ELEVATOR (PITCH)
When an elevator input is given, all three servos must move
to tilt the swashplate fore and aft, but their directions vary.
The two front servos (B and C) move together in the same
direction, while the top servo (A) moves in the opposite
direction. For example, when a down elevator (forward cyclic)
command is given, the two front servos (B and C) will move
rearward, while the top servo (A) moves foreward so that the
swashplate will tilt forward. During this function with 120°
CCPM, the top servo (A) travels at 100%, while the two front
servos (B and C) travel at 50% (
1
/
2
the travel value) of the top
servo. This difference in travel is necessary due to the fact that
the position of the 120 CCPM rear control ball is two times
the distance of the two front control ball position as measured
from the center of the swashplate. With 140° CCPM selected,
all three servos travel at 100%, eliminating elevator trim
changes during quick collective inputs. This mixing of the
three servos is also achieved through the 140
°
CCPM program
only found in JR 10X systems.
3. AILERON (ROLL)
When an aileron (roll) input is given, the two front servos
(B and C) travel in opposite directions, while the top servo (A)
remains motionless. For example, when a right aileron (roll)
command is given, the left front servo (C) will move forward,
while the right front servo (B) will move backward to tilt the
swashplate to the right. As mentioned, the top servo (A) will
remain motionless. The travel value for each of the two rear
servos is 100%.
HOW JR
®
120/140 CCPM WORKS
Collective Movement
1
A
B
C
Elevator Movement
2
Aileron Movement
3
A
B
C
Summary of Contents for Vigor CS
Page 64: ...64 E A C D G F DECAL PLACEMENT ...
Page 65: ...65 B 3 2 5 1 DECAL PLACEMENT ...







































































