





























33 | Installation Instructions
1.7 First Start-up procedure
When the AlphaMidicourse Mk2 is installed and the cables are connected to its Control box then the system is ready for
the first-time start-up procedure.
1.7.1 Start-up Master Compass
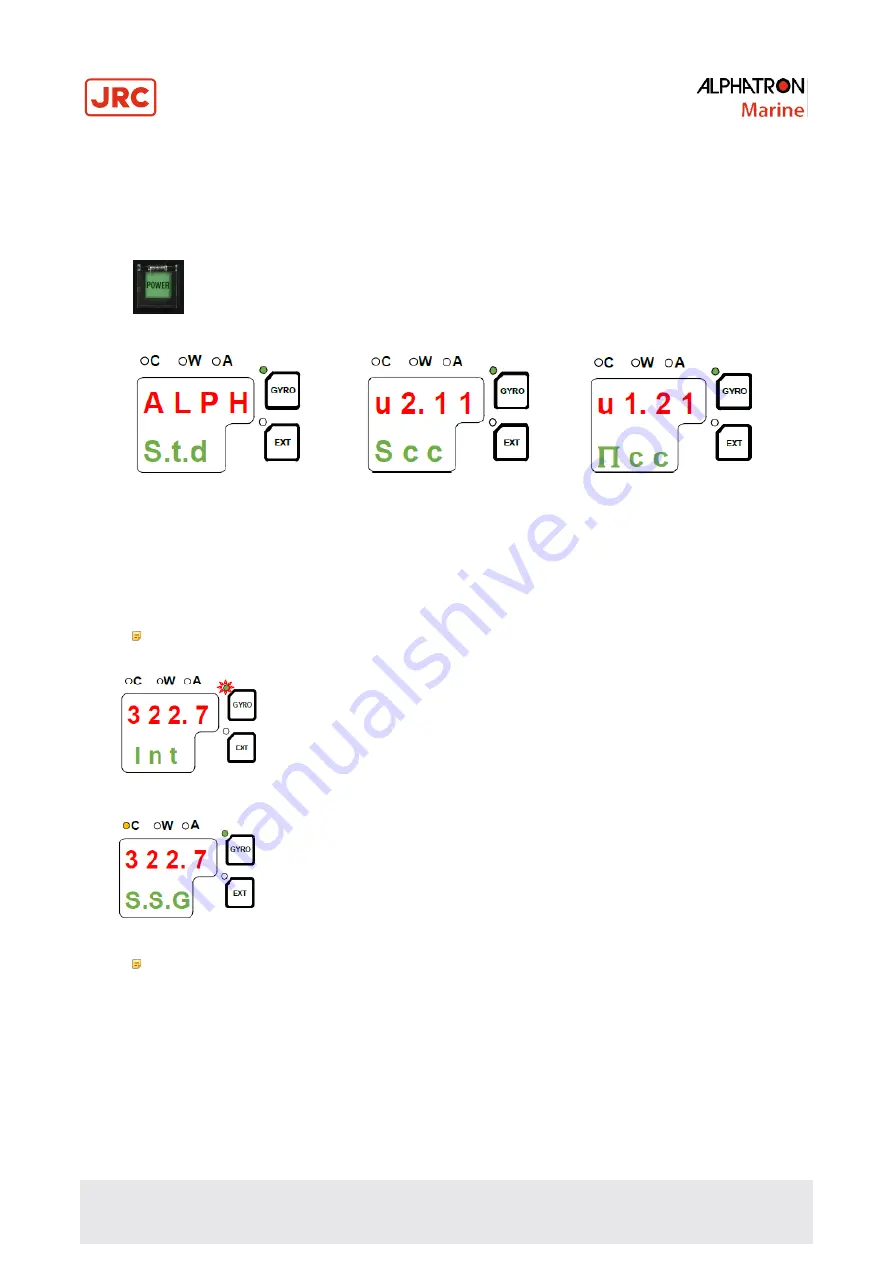
Turn ON the system by pressing the
POWER
button on the Control panel. The following start-up
sequence will take place.
Control Unit type Software version for Control unit and Master compass is displayed in rapid succession.
Examples of display text are shown below:
The sensitive element starts rising horizontally and the compass turns 360
°
clockwise. Its display will show a decreasing
in bearing while the compass is turning.
Note
If the gyro has been turned ON and OFF again, but rotor was still rotating when POWER button was
pressed for a new start, a rotor break function will be activated, see paragraph 2.10.
When the rotor rotation is stopped its start bearing will be indicated with
flashing
text
Int
.
The
start bearing will be the same as active bearing when the compass was turned OFF.
The indicated start bearing is accepted by pressing the
ACK/ENT
button or increase/decrease
by using the ▲ or ▼ buttons and then by pressing the
ACK/ENT
button. If no action is taken
within 3 minutes the start-up process will continue with the indicated start bearing. The bearing
indication stops flashing when the start bearing is accepted, while the green led next to
GYRO
button remains flashing.
The rotor starts spinning and reaches full speed after maximum 30 minutes.
When the rotor has reached full speed the gyrocompass starts its north seeking function. Its
display will now change to show the compass actual heading and from now on heading output
will be available.
The green led next to the
GYRO
button changes from flashing to constant litted. The
AlphaMidicourse Mk2 will be settled within 3 hours when started with a deviation angle of less
than 5° respect to its true heading. With a larger deviation angle the compass will be settle
within 4 hours.
Note
AlphaMidiCourse Mk2
CAUTION
alarm will be active until input sources latitude and speed are set. See
paragraph 1.7.3
Setting the Latitude input source
and 1.7.4
Setting the Speed input source
how to set them.
ALPH:
Alphatron
Std:
Standard type
HSc:
High Speed type
Software version
Control Unit
Software version
Master Compass
Summary of Contents for ALPHAMIDICOURSE Mk2
Page 80: ...80 Appendices 6 1 1 Dimensions of Control Unit...
Page 81: ...81 Appendices 6 1 2 Dimensions of Master Compass...
Page 82: ...82 Appendices 6 1 3 Master Compass without housing...
Page 84: ...84 Appendices 6 1 5 Connection Diagram...
Page 85: ...75 Appendices 6 1 6 Cable Diagram...
Page 86: ...76 Appendices 6 1 7 Installation Drawing...
Page 88: ...78 Appendices AlphaMidiCourse Mk2 Check Maintenance Sheet...
Page 89: ...79 Appendices AlphaMidiCourse Mk2 Check Maintenance Sheet...
Page 90: ...80 Appendices AlphaMidiCourse Mk2 Check Maintenance Sheet...
Page 91: ...81 Appendices AlphaMidiCourse Mk2 Check Maintenance Sheet...
Page 92: ...82 Appendices AlphaMidiCourse Mk2 Check Maintenance Sheet...
Page 95: ...85 Appendices 6 4 Return Slip Sensitive element...
Page 96: ...86 Appendices...
Page 99: ......






















































