





























JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
155
6.5.2
Running Position control
Running the motor in position control requires that the mode register is set for position
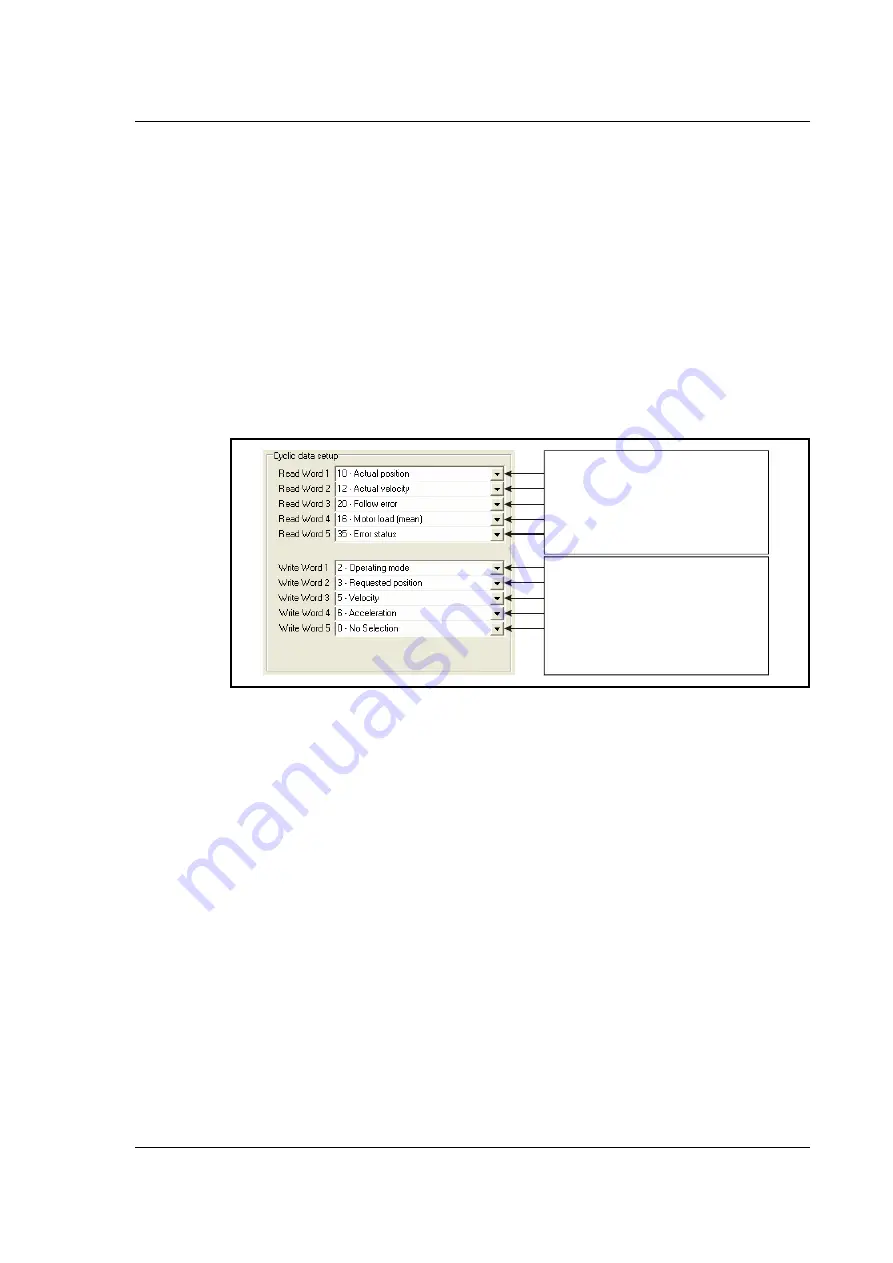
control. The following registers is of particular interest when position mode is used.
1. "Actual position" -P_IST, register 10
2. "Actual velocity" -V_IST, register 12
3. "Follow error" - The actual position error, register 20
4. "Motor load mean" - average motor load, register 16
5. "Error/Status" -register 35
6. "Requested position" -P_SOLL, register 3
7. "Requested velocity" -V_SOLL, register 5
8. "Requested acceleration" -A_SOLL, register 6
In this mode the position is controlled by applying a requested position to the "P_SOLL"
-register and the actual position is monitored in the "P_IST" register. The V_SOLL and
A_SOLL registers sets the velocity and acceleration used when positioning occurs.
6.5.3
General considerations
The register 35 in the motor holds information on the actual error/status. So it is crucial
that this register is configured in the cyclic data and thereby obtained and monitored in
the Master. In case of an error situation the motor will stop and the cause will be present
in the register 35 and hence in the I/O -data.
This register also holds information on the motion status such as:
• In position, bit 4
• Accelerating, bit 5
• Decelerating, bit 6
Please find a complete list of register descriptions in the appendix.
Motor registers MAC050 - 141, page 264
Motor registers MAC400 - 4500, page 273
Motor registers MISxxx, page 292
The JVL motor is basically put into a working mode and into a passive mode where the
motor axle is de-energized, by setting register 2 into either 0 = "passive mode" or into
one of the supported modes.
Example.
1= "Velocity mode" / 2= "Position mode" / etc.
So in order to Stop or Start the motor this register can be supported in the I/O data or
by sending an acyclic message.
TT3017GB
Values:
Position mode = 2
Passive mode = 0
Requested position, Sets the P_SOLL value.
Velocity, sets the V_SOLL requested velocity value
The resolution is 100 RPM = 277 counts/sample
Acceleration, requested acceleration
Actual position, P_IST value is sent back in
this word
10
2
Operating mode is used to enable/disable the motor
12
3
Follow error, the position error
Actual velocity, V_IST is sent back in this word
20
5
16
6
Motor load mean. The mean load on the motor
Error/Status holds information regarding motion
status and error status/code if any
35
0
Not used - Any register can be inserted here
Summary of Contents for MAC00-EC4
Page 2: ......
Page 14: ...14 JVL Industri Elektronik A S User Manual Ethernet expansion modules for MAC motors ...
Page 32: ...32 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 78: ...78 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 136: ...136 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 176: ...176 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 177: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 177 8 Sercos ...
Page 224: ...224 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 241: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 241 ...
Page 252: ...252 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 256: ...256 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 257: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 257 12 Appendix ...







































































