





























208
JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
8.4.2.1
Parameterization level (PL)
Parameterization level can be used to change parameters that are write protected in op-
erating level and for which write protection is bound to the sub-device state machine,
without leaving communication phase CP3/CP4. This can be useful, if application specific
parameters of a specific sub-device have to be adjusted while the applications of other
connected slaves remain activated. With the activation of the parameterization level the
corresponding monitoring bits of
S-0-0135
, Drive status bits 15 and 14 are set to 0. Pa-
rameters which are write protected in parameterization level (PL) cannot be changed.
8.4.2.2
Operating level (OL)
The sub-device is ready for running the application. All monitoring systems are switched
on. Parameters which are write protected in operating level (OL) cannot be changed. Bit
4 (Sub-device level) of the Device Status word is set to "0" (operating level (OL) is active).
8.4.2.3
Control of sub-device state machine
In order to control the state machine of the sub-device independent from the communi-
cation state machine, the following commands can be executed:
S-0-0420
Activate parametrization level procedure command (PL)
S-0-0422
Exit parameterization level procedure command
The sub-device state machine is normally coupled with the communication state ma-
chine. So in communication phases CP0, CP1, CP2 the sub-device state machine is in pa-
rameterization level, and in communication phase CP3 and CP4 the sub-device state
machine is in operating level.
It is possible to decouple this connection by setting bit 1 of
S-0-0425
Sub-device state
machine control.
8.4.3
Operation modes
Used IDN’s for drive control, independent of selected operation mode:
“RO”
=Read
Only,
”RW”
=
Read
and
Writeable,
”C”
=
Map
able
to
Cyclic
data,
“T”
=
Map
able
to
real
Time
bits.
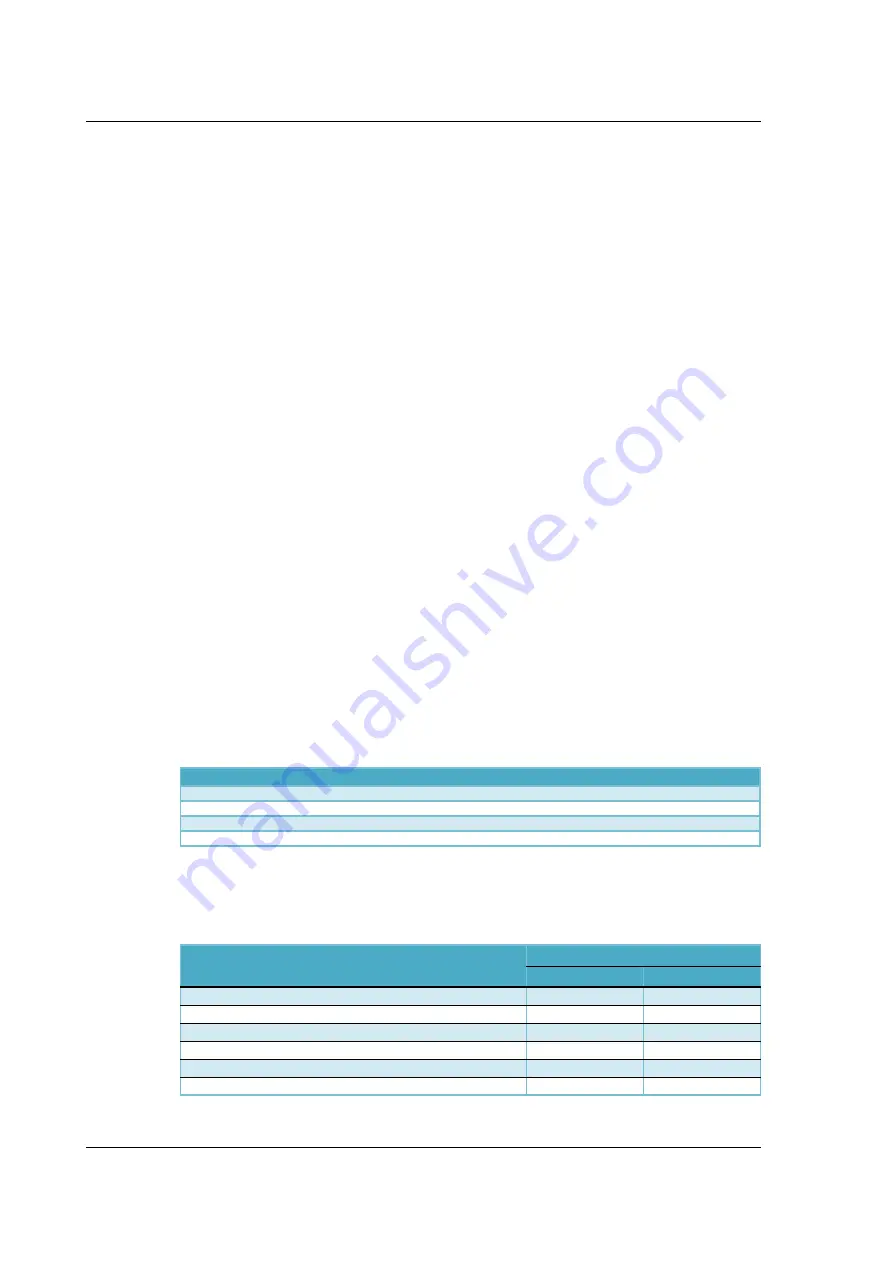
The JVL Sercos
®
module supports the following operation modes of FSP Drive which is
setup in IDN
S-0-0032:
IDN
Description
Default
Units
Attributes
S-0-0032 Gets/sets the primary operation mode of the drive
3
-
RW
S-0-0134
Drive control word
-
-
RW, C
S-0-0135
Drive status word
-
-
RO, C
S-0-0292
List of supported operation modes
-
-
RO
Mode
Value in S-0-0032
Decimal
Hexadecimal
Velocity control
2
0x02
Position control (
default setting
)
3
0x03
Velocity control without following distance
10
0x0A
Position control without following distance
11
0x0B
Synchronous Velocity control
66
0x42
Synchronous Position control
67
0x43
Summary of Contents for MAC00-EC4
Page 2: ......
Page 14: ...14 JVL Industri Elektronik A S User Manual Ethernet expansion modules for MAC motors ...
Page 32: ...32 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 78: ...78 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 136: ...136 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 176: ...176 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 177: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 177 8 Sercos ...
Page 224: ...224 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 241: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 241 ...
Page 252: ...252 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 256: ...256 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 257: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 257 12 Appendix ...







































































