


















296
JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
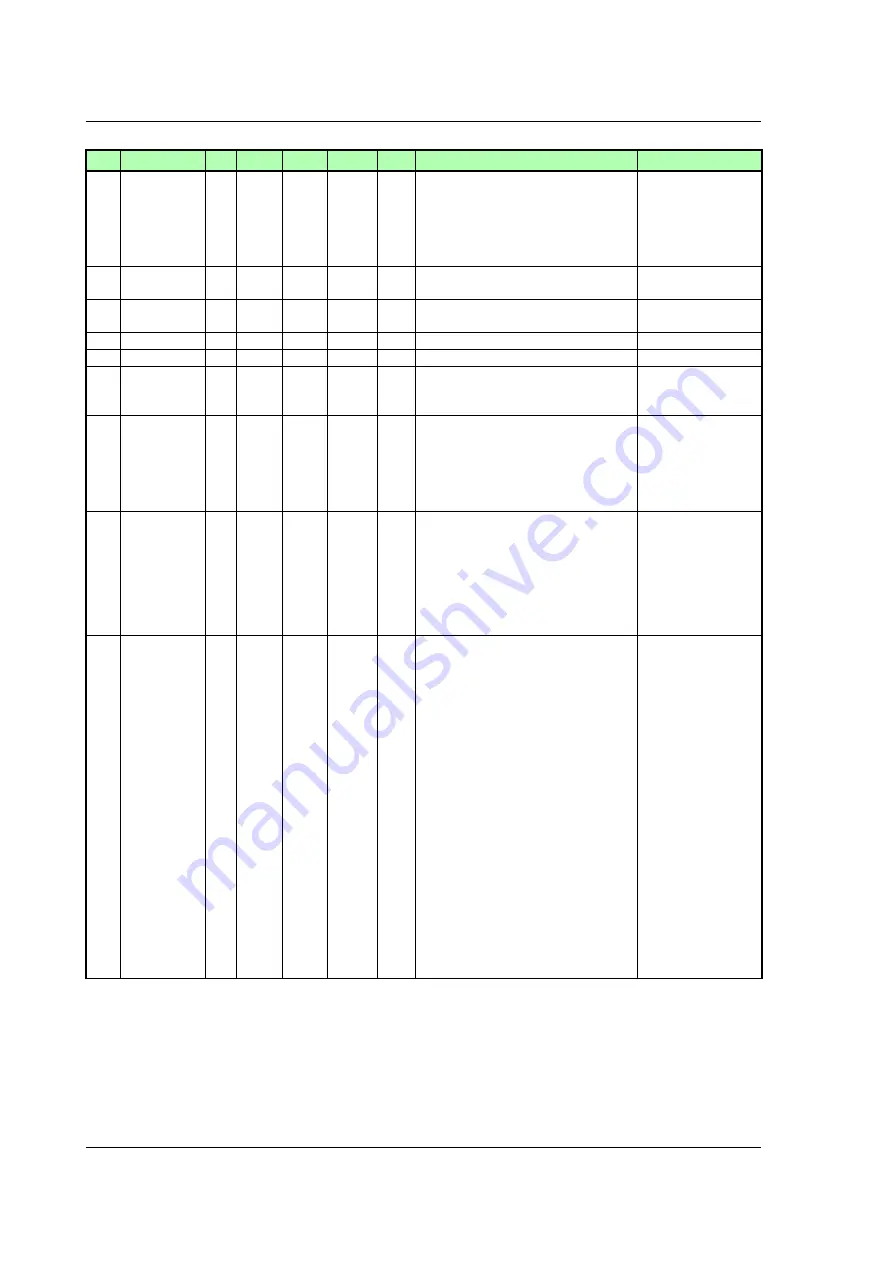
Reg
Name
Size Access Range Default Unit
Description
MacTalk
name
111
SSI_Setup2
32bit R/W
‐
‐
Special
SSI
setup
bits:
Bit
0
‐
7:
Prepare
time
Bit
8:
Gray
to
bin
conversion
Bit
9:
Reserved
Bit
10:
Disable
interrupts
Bit
11
‐
18:
Wait
time
SSI
Encoder
setup
112
‐
115
SAMPLE1
‐
4
32bit R/W
‐
0
‐
Select
what
register(s)
to
sample
–
part
of
the
sample/scope
function.
N/A
116
REC_CNT
32bit R/W
‐
0
‐
Number
of
samples
to
make
–
part
of
the
scope/
sample
function.
N/A
117
S_TIME
32bit R/W
‐
1
ms
Sampletime
–
part
of
the
scope/sample
function.
N/A
118
S_CONTROL
32bit R/W
‐
0
‐
Controls
the
scope/sample
system.
N/A
120
INDEX_
OFFSET
32bit R
0
‐
409600
‐
Steps
The
position
of
the
zero
sensor
relative
to
the
encoder
index.
This
is
set
after
a
zero
search
where
the
index
is
used.
Tests
tab
121
Modbus_Setup
32bit R/W
‐
0
Special
Modbus
setup
bits:
Bit
0:
Enabled
Bit
1:
Type
Bit
2
‐
3:
Parity
Bit
4:
Data
bits
Bit
5:
Stop
bits
N/A
122
Zero_Search_BITS 32bit R/W
‐
0
Special Bits
to
control
Zero
Search:
Bit
0:
Search
for
index.
Bit
1:
Change
direction
on
limit.
Bit
2:
Search
for
opposite
side
of
sensor.
Bit
3:
Reserved
Bit
4:
Ignore
switch
(Used
for
searching
only
for
index).
Bit
5:
Disable
the
60
s
Zero
Search
time
out.
Advanced
–>
Zero
search
124
SETUP_BITS
32bit R/W
‐
0
Special Bit
0:
Invert
motor
direction.
Bit
1:
Don’t
start
program
after
power
up.
Bit
2
‐
3:
External
encoder
input
type
Bit
5:
Synchronize
to
encoder
after
passive
Bit
6:
In
phys.
Position
update
continuously
Bit
10:
Startup:
Transfer
single
turn
position
to
P_IST
Bit
11:
Startup:
Transfer
multi
turn
position
to
P_IST
Bit
12:
Startup:
Keep
External
Encoder
Bit
13:
Startup:
Keep
SSI
Value
Bit
14:
CANopen:
Beckhoff
mode
Bit
16:
External
Encoder
counting
direction
Bit
17:
Disable
position
limit
error
Bit
19:
Disable
brake
(int./ext.)
temporarily
Bit
20:
Disable
SSI
encoder
error
Bit
21:
Low
bus
voltage
‐
>
Error
Bit
22:
Low
bus
voltage
‐
>
Passive
Bit
23:
Low
bus
voltage
‐
>
0
RPM
Bit
24:
Enable
closed
loop
Bit
25:
Enable
closed
loop
current
control
Bit
28:
Position
limits
without
memory
0:
Invert
motor
direction
1:
Don’t
start
program
after
power
up
2
‐
3:
0
=
Disabled,
1
=
Quadrature,
2
=
Puls/
direction
17:
No
error
if
position
limit
is
detected
Summary of Contents for MAC00-EC4
Page 2: ......
Page 14: ...14 JVL Industri Elektronik A S User Manual Ethernet expansion modules for MAC motors ...
Page 32: ...32 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 78: ...78 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 136: ...136 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 176: ...176 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 177: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 177 8 Sercos ...
Page 224: ...224 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 241: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 241 ...
Page 252: ...252 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 256: ...256 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 257: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 257 12 Appendix ...







































































