





























JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
73
3.6
Examples
3.6.1
Running Velocity control (JVL Profile)
To use the JVL motor in velocity mode the following registers are basically of interest.
1. "Mode" - Mode register register 2
2. "V_SOLL" - Velocity register 5
3. "A_SOLL" - Acceleration register 6
4. "Error/Status" - Error and status register 35
So, to control these registers the cyclic data needs to configured.
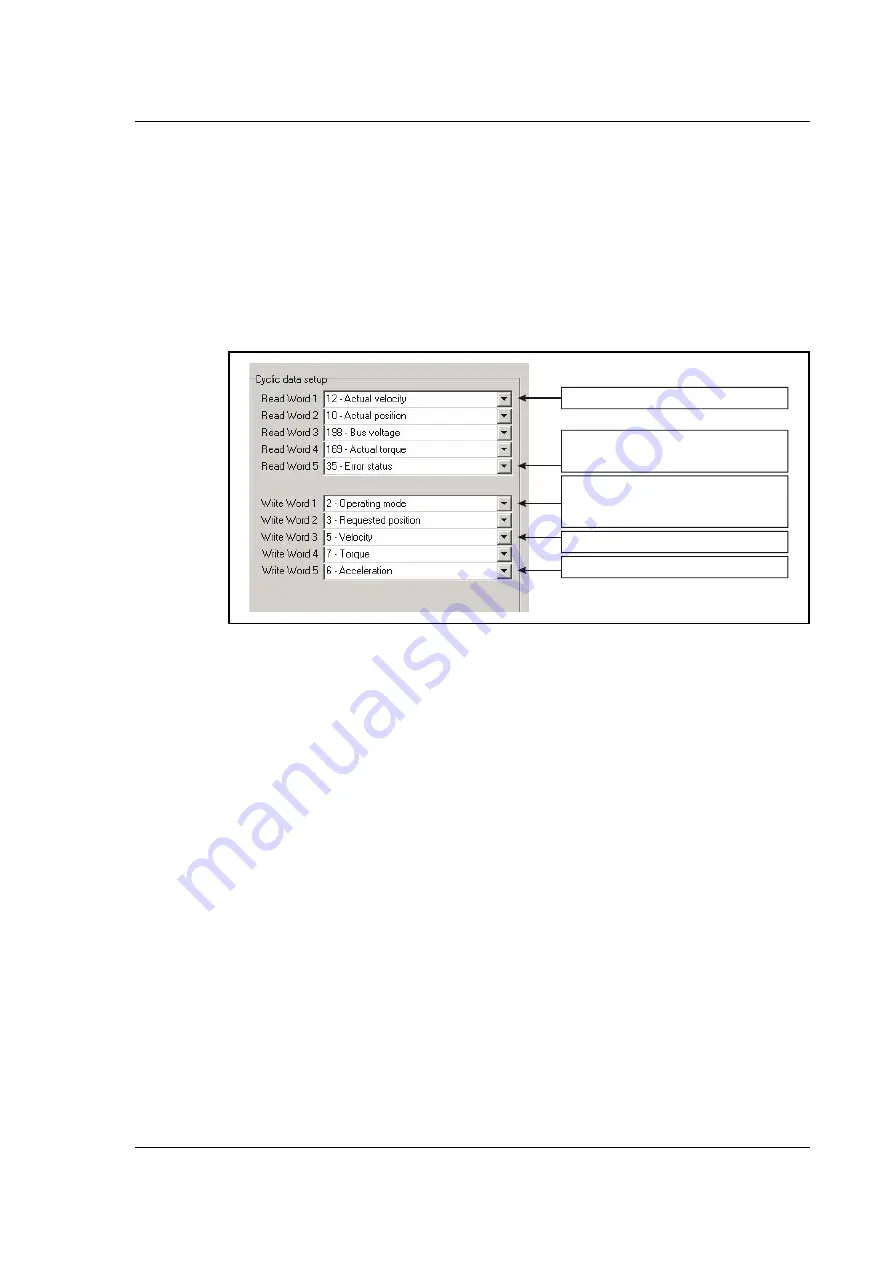
From MacTalk the setup is configured as this.
With the settings illustrated above we initiate the velocity mode by writing 0x1 to the first
word-value, this is velocity mode.
From the Master the registers is accessed using the PDO’s and accessing the registers R/
W on words 1-8.
Since different PLC's have different methods of implementation the basic steps is de-
scribed in the following. (Constant values valid for MAC800, for other motors, please
consult the motor manual)
1. Set the needed velocity. V_SOLL = V x 2.77 [rpm]
Ex. We need the motor to run with a constant speed of 1200 RPM. So, V_SOLL =
1200/2,77 = 433 cnt/smp
2. Set the needed acceleration. A_SOLL = A x 271 [RPM/s²]
Ex. We need the motor to accelerate with 100000 RPM/s² so, A_SOLL = 100000/
271 = 369 cnt/smp².
3. Now set the motor into velocity mode and thereby activate the motor.
Ex. The motor needs to be activated by setting it into velocity mode, so we need to
set the mode register to the value 1. Mode = 1 which is velocity mode, now the mo-
tor will use the acceleration and the velocity just configured.
Please find a complete list of register descriptions in the appendix.
Motor registers MAC050 - 141, page 264
and
Motor registers MAC400 - 4500, page 273
and
Motor registers MISxxx, page 292
The actual velocity is transferred in the 1. word
The 5. word holds the data from the error/status
register. This data is a bitfield structure holding both
motion related information and present error type.
The operation mode is set in the 1. Word,
0=passive mode and 1=Velocity mode.
Use passive mode to stop the motor and
velocity mode to start the motor.
The requested velocity is set in the 3. word
The requested acceleration is set in the 5. word
TT3016GB
Summary of Contents for MAC00-EC4
Page 2: ......
Page 14: ...14 JVL Industri Elektronik A S User Manual Ethernet expansion modules for MAC motors ...
Page 32: ...32 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 78: ...78 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 136: ...136 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 176: ...176 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 177: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 177 8 Sercos ...
Page 224: ...224 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 241: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 241 ...
Page 252: ...252 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 256: ...256 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 257: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 257 12 Appendix ...







































































