JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
89
The 5 write registers are configured to hold the following data:
Motor register 2 (Operating mode)
0=passive, 1=Velocity, 2=position etc
Motor register 6 (Acceleration)
The requested acceleration to be used.
Motor register 5 (Velocity)
The requested Velocity to be used.
Motor register 7 (Torque)
The max. allowed Torque to be used
Motor register 3 (Requested position) The requested position if operating mode = 2
(position)
Please find a complete list of register descriptions in the appendix.
Motor registers MAC050 - 141, page 264
and
Motor registers MAC400 - 4500, page 273
and
Motor registers MISxxx, page 292
Please notice:
Even though all registers is transmitted as 32 bit, some of them
originally derive from 16 bit in the case of MAC050-141. In those situations it
is necessary to interpret them as 16 bit to get the sign correct.
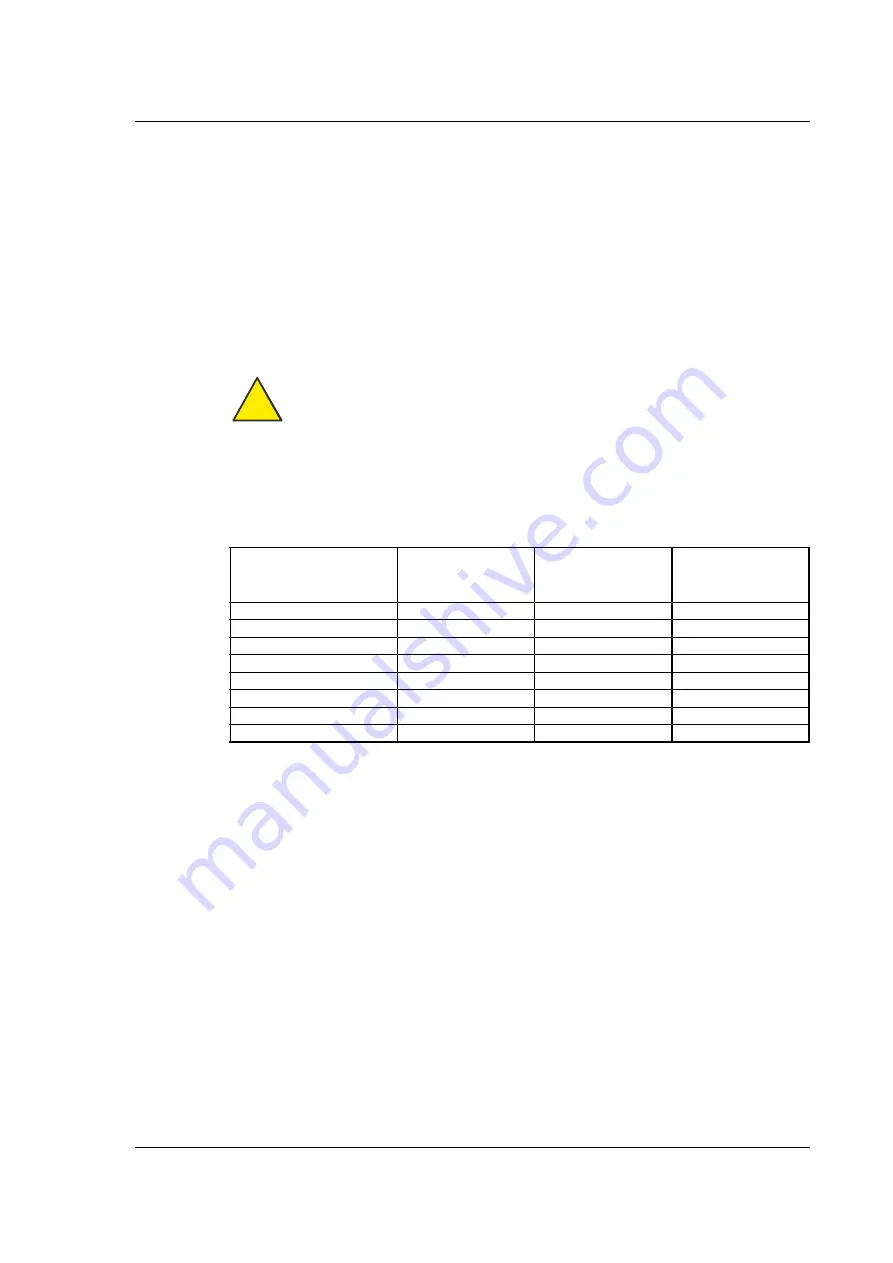
4.3.2
Minimum cycle time
The minimum cycle time is the minimum amount of time between each cyclic request
on the Ethernet. If operating with values lower than those listed, data loss will occur.
* The minimum cycle times, is only valid if not sending any acyclic requests while in any
operating mode. MODULE registers can be appended as the last registers in the list,
at no extra timing cost. Motor register 35 shall be in the cyclic read list, as it is also
used internally.
** Restrained by the EthernetIP protocol it self.
No. of motor registers
transmitted in each
direction
Motor series
MAC050 to
MAC141
Motor series
MAC400 to
MAC4500
Motor series
MIS/MILxxx
1/1
4ms *
1ms **
1ms **
2/2
8ms *
1ms **
1ms **
3/3
12ms *
1ms **
1ms **
4/4
16ms *
1ms **
1ms **
5/5
20ms *
1ms **
1ms **
6/6
24ms *
1ms **
1ms **
7/7
28ms *
1ms **
1ms **
8/8
32ms *
1ms **
1ms **
!
Summary of Contents for MAC00-EC4
Page 2: ......
Page 14: ...14 JVL Industri Elektronik A S User Manual Ethernet expansion modules for MAC motors ...
Page 32: ...32 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 78: ...78 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 136: ...136 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 176: ...176 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 177: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 177 8 Sercos ...
Page 224: ...224 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 241: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 241 ...
Page 252: ...252 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 256: ...256 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 257: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 257 12 Appendix ...