





























JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
273
12.3
Motor registers MAC400 - 4500
12.3.1
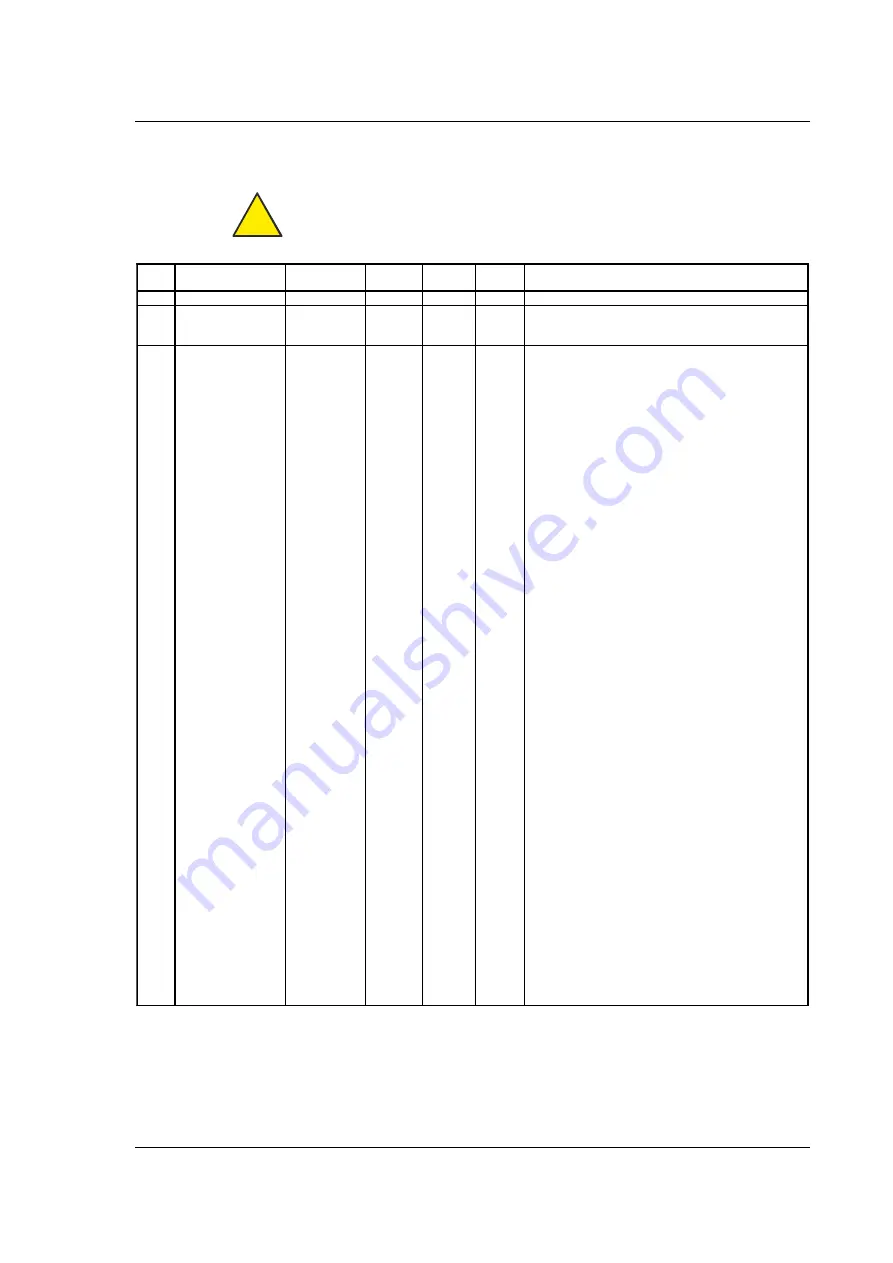
Register list for MAC400, 800, 1500 and 4500
The following list is only valid for the MAC400 to MAC4500 motors.
Please notice:
At the Ethernet modules all registers is transmitted as 32 bit,
some of them originally derive from 16 bit in the case of MAC050-141. In those
situations it is necessary to interpret them as 16 bit to get the sign correct.
!
Reg.
Nr.
Firmware /
MacRegIo Name
MacTalk
Name
Range /
Default
Size /
Access
Unit
Description
0
N/A
N/A
N/A
N/A
N/A
Dummy register, do not use.
1
PROG_VERSION
Displayed on
bottom right
status line.
-
-
/
R
-
Firmware version
2
MODE_REG
Startup
mode /
Change
actual mode
0..25,
256,
257,
258
/
0
(passive)
Word
/
RW
-
The actual operating mode of the drive.
In general, the motor will either be passive, attempt to
reach a certain position, attempt to maintain a
constant velocity or attempt to produce a constant
torque. The various modes define the main type of
operation as well as what determines the setpoint for
that operation.
The special cases 256..258 are
used to perform a few
special operations on the entire set of registers.
Supported values are:
0 =
Passive mode
. The axis is not controlled by the
drive, and can easily be moved by hand or external
mechanics.
1 =
Velocity mode
. The drive will attempt to run the
motor at a constant velocity selected by Reg5,
V_SOLL, without violating the maximum torque or
acceleration.
2 =
Position mode
. The drive will at all times attempt
to move the actual motor position to the position
selected by Reg3, P_SOLL, without violating the
maximum velocity, torque or acceleration.
3 = Gear Position mode.
4 = Analogue torque mode.
5 = Analogue velocity mode.
6 = Analog Velocity Gear mode.
7 = Manual current mode.
8 = Step response test mode.
9 = Internal test mode.
10 = Brake mode.
11 = Stop mode.
12 = Torque based zero search mode.
13 = Forward/only zero search mode.
14 = backward zero search mode.
15 = Safe mode.
16 = Analogue velocity with deadband mode.
17 = Velocity limited Analog Torque mode.
18 = Analogue gear mode.
19 = Coil mode.
20 = Analogue bi-position mode.
21 = Analogue to position mode.
22 = Internal test mode.
23 = Internal test mode.
24 = Gear follow mode.
25 = IHOME mode.
256:
257:
258:
Summary of Contents for MAC00-EC4
Page 2: ......
Page 14: ...14 JVL Industri Elektronik A S User Manual Ethernet expansion modules for MAC motors ...
Page 32: ...32 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 78: ...78 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 136: ...136 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 176: ...176 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 177: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 177 8 Sercos ...
Page 224: ...224 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 241: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 241 ...
Page 252: ...252 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 256: ...256 JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors ...
Page 257: ...JVL Industri Elektronik A S User Manual Ethernet for MAC and MIS motors 257 12 Appendix ...







































































