

























11
THEORY OF OPERATION
SONAR BASICS
Sonar is the bouncing of an acoustic signal off a target and then measuring the time it takes to
return - thus giving us distance, and measuring the size or amplitude of the returned signal - thus
giving us hardness of the target. Since the speed of sound in water is known (1500 meters per
second), it is easy to determine the distance to a target by simply measuring the time it takes to
make the round-trip and dividing by two. If we examine the size of the returned signal (amplitude),
we can determine if the sonar signal hit a soft object (mud bottom) or a hard object (rocky bottom).
The muddy bottom will absorb much of the signal with very little signal (echo) being returned. The
rocky bottom produces a large echo which is called a hard return.
The acoustic signal is produced by a transducer. In operation, the transmitter generates an
electrical pulse which is applied to the transducer. The transducer converts this pulse to a mechani-
cal vibration which produces an oscillating pressure wave in the water thus forming a sound pulse.
The pulse then travels away from the transducer until it strikes an object at which point some portion
of the pulse is reflected back to the transducer as an echo.
When the echo returns to the transducer, the transducer is mechanically excited by the sound
pressure and converts the vibration into an electrical signal. This signal is then detected and ampli-
fied by the receiver.
The control/display unit regulates the precise timing between the transmitters, receiver and dis-
play elements.
DEPTH SOUNDER
Depth sounders are a simple form of sonar. They send out a conical shape energy pulse toward
the bottom, listen for the return, calculate the time it took, and displays the answer in feet (of depth).
If your depth sounder has a display or a printout, a line will be drawn representing the bottom. Be-
cause the beam is so wide (15 to 30 deg), the beam will be on the object for a long time as you pass
over it. As a result, even smaller objects appear to be quite large on the printout. Fish show up as
large arcs on the display. Depth sounders typical operate at a frequency of between 50kHz and
200kHz. Good for long range but not for detecting small targets
SCANNING SONAR
Scanning sonar refines the process by decreasing the beam width to a very narrow 2 deg (2 deg
by 40 deg fan shaped beam) and dramatically increasing the frequency of the signal (typically 600kHz
range). The very narrow fan shaped beam and high frequency dramatically improves the detail of the
objects on the bottom. The fact that scanning sonar sweeps the beam back and forth across the
bottom gives a major improvement over the depth sounder printout for bottom detail. Not only can
very small targets be detected but the details of the target can be seen.
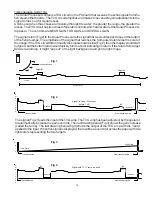
Side View (fan shaped signal)
Top View (very narrow signal)
SCAN-650
SCAN-650
Signal
Signal
Summary of Contents for SCAN-650
Page 10: ...10 LEFT BLANK...





















































