





























W W W . K A A R T A . C O M
7 7
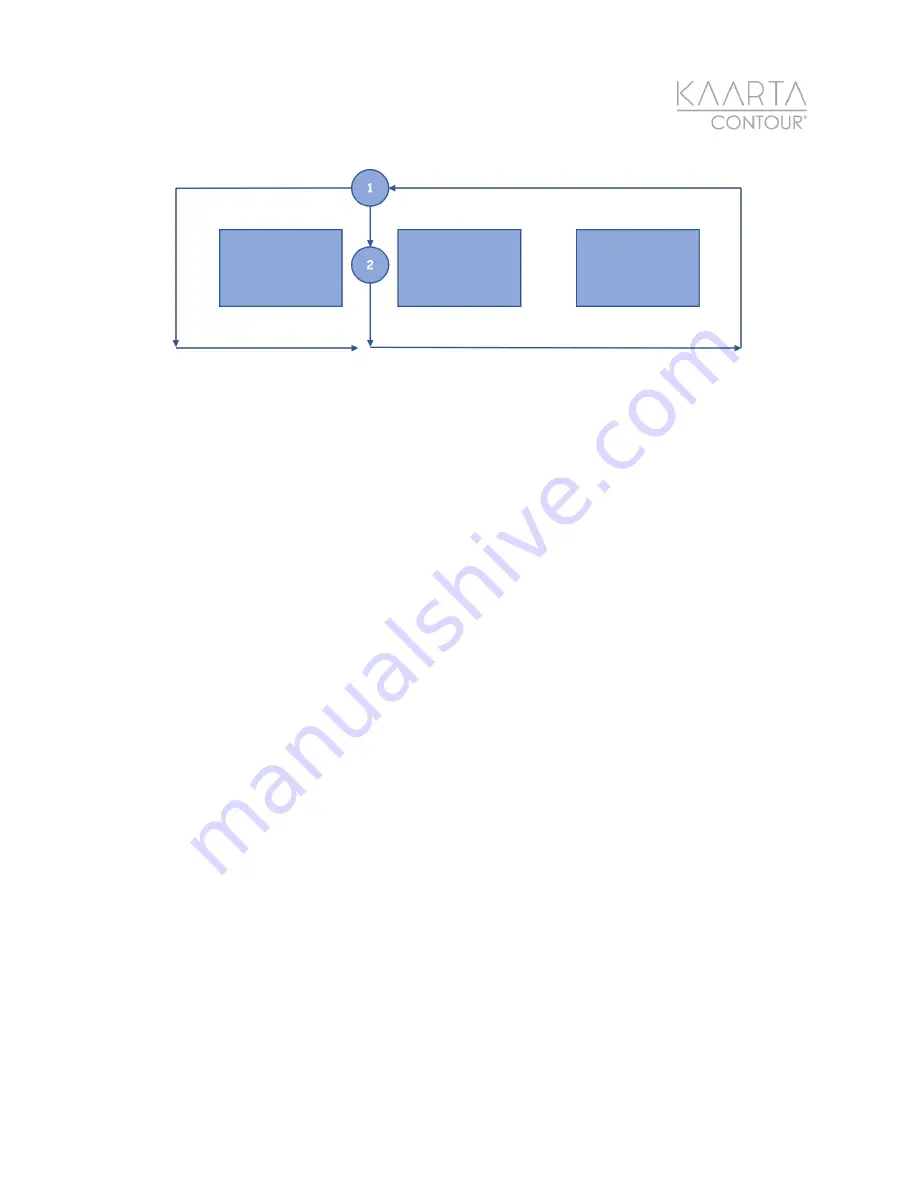
Figure 54: Scanning pattern best practice.
It is better to overlap scanning areas than to go for longer distances and coming back to
the beginning - like a lawn mowing pattern.
If the area is very large (more than 15 meters or about 50 feet), then make sure there is
always some 3D structure in the field of view.
Scanning will fail if there is insufficient 3D structure to match between laser scans. It is
better to use do two independent maps and then merge the two areas in CloudCompare
after post-processing has occurred. See Kaarta’s Using CloudCompare manual for more
information.
Ground control points (GCP) can be used to improve map accuracy. GCPs should be
physically visible in the pointcloud and not a flat reflectance target on the ground. Aligning
your pointcloud to known GCPs can be done in 3
rd
-party pointcloud editing software,
including CloudCompare’s Align tool. See Kaarta’s Using CloudCompare manual for more
information.
Consider the final pointcloud size/density you want and plan accordingly. As a rule of
thumb, Contour collects 35,000 points per second. If you need higher density data, walk
and turn slowly. For sparser data, you can walk much faster.
I N D O O R S C A N N I N G
Start from a stationary position. Allow five seconds after colored pointcloud appears before
moving. This results in better floor leveling with respect to gravity and a better base map
to register to.
For larger spaces, start with straight-line paths to establish the walls and exterior of the
space. Then fill in with shorter scanning paths to cross.
The less occluded the sensor is, the better the results. Do not point the scanner directly at
featureless walls. It is better to hold Contour at an angle to the wall to capture more unique
3D features in the room.







































































