





























Installation
Alternative Installation Options
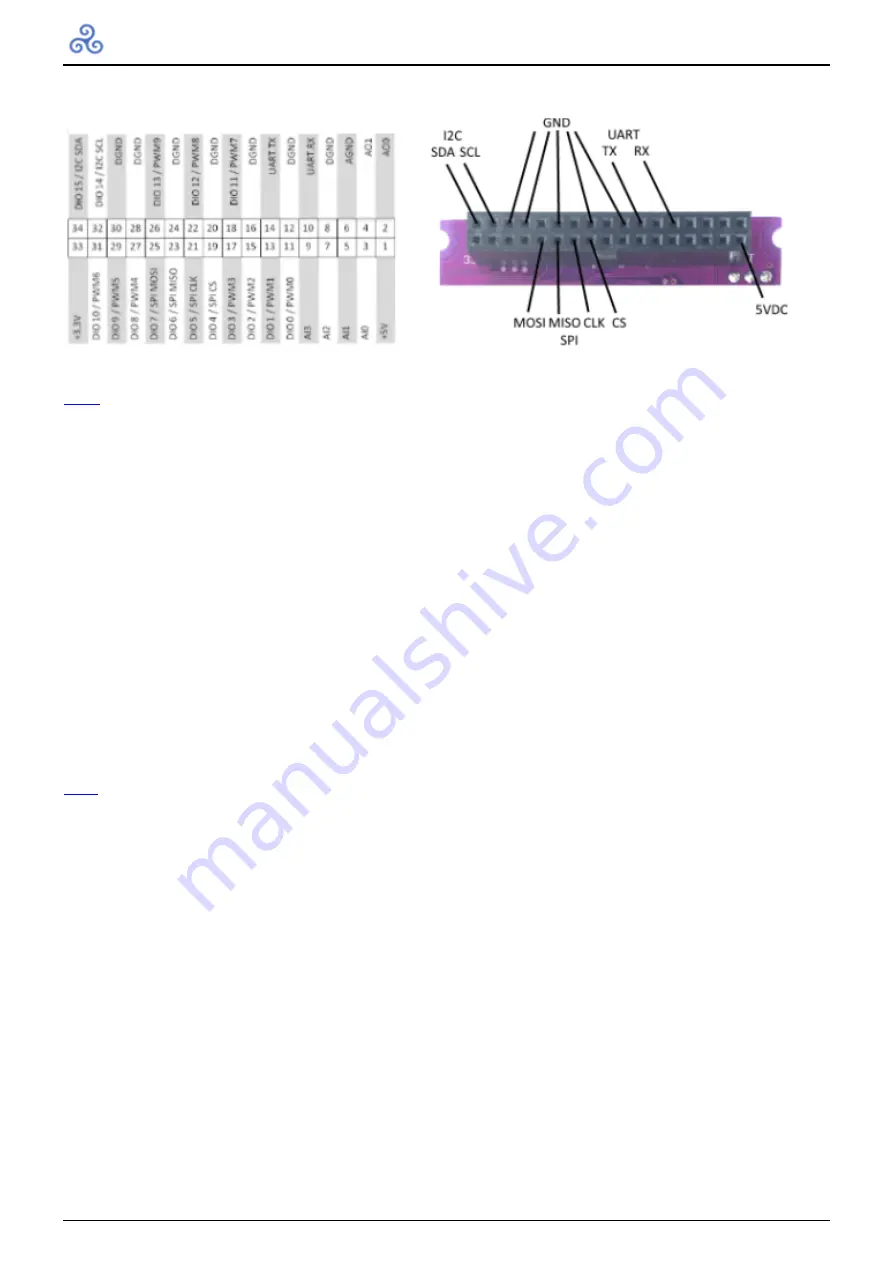
I2C
To use the I2C interface without directly plugging the navX2-MXP circuit board into the RoboRIO MXP
connector, first ensure that the navX2-MXP circuit board has power (either via the USB connector, or via
the +5VDC pin on the MXP connector).
Next, make sure that the digital ground from the host computer (e.g., the RoboRIO) is connected to one of
the GND pins on the MXP connector.
Finally, connect the SDA and SCL pins on the host computer (e.g., the RoboRIO) to the corresponding
SDA and SCL pins on the navX2-MXP circuit board.
Note that the I2C bus expects that the SDA and SCL pins be pulled up with a pull-up resistor on each
line. The RoboRIO internally pulls these lines high.
The I2C pins are 5V tolerant, so the host computer can use either 5V or 3.3V DC levels on these pins.
SPI
To use the SPI interface without directly plugging the navX2-MXP circuit board into the RoboRIO MXP
connector, first ensure that the navX2-MXP circuit board has power (either via the USB connector, or via
the +5VDC pin on the MXP connector).
Next, make sure that the digital ground from the host computer (e.g., the RoboRIO) is connected to one of
the GND pins on the MXP connector.
Finally, connect the CS, CLK, MISO and MOSI pins on the host computer (e.g., the RoboRIO) to the
corresponding CS, CLK, MISO and MOSI pins on the navX2-MXP circuit board.
The SPI pins are 5V tolerant, so the host computer can use either 5V or 3.3V DC levels on these pins.
Creating an Enclosure
26







































































