




























6
4
KEB COMBIVERT F5-M / S
4
Name: Basis
12.05.04
Chapter
Section
Page
Date
©
KEB Antriebstechnik, 2002
All Rights reserved
Functional Desription
Setpoint- and Ramp Adjustment
ru.27
ru.29
ru.53
oP. 3
SY.52
oP. 5
oP. 0
0
1
2
3 4 5 6
7
8
9
ru.52
ru.31
ru.28
ru.30
ru.32
ru.37
ru.4 ru.9
ru.5 ru.10
10
oP.63
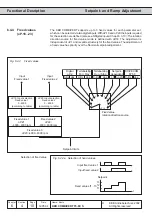
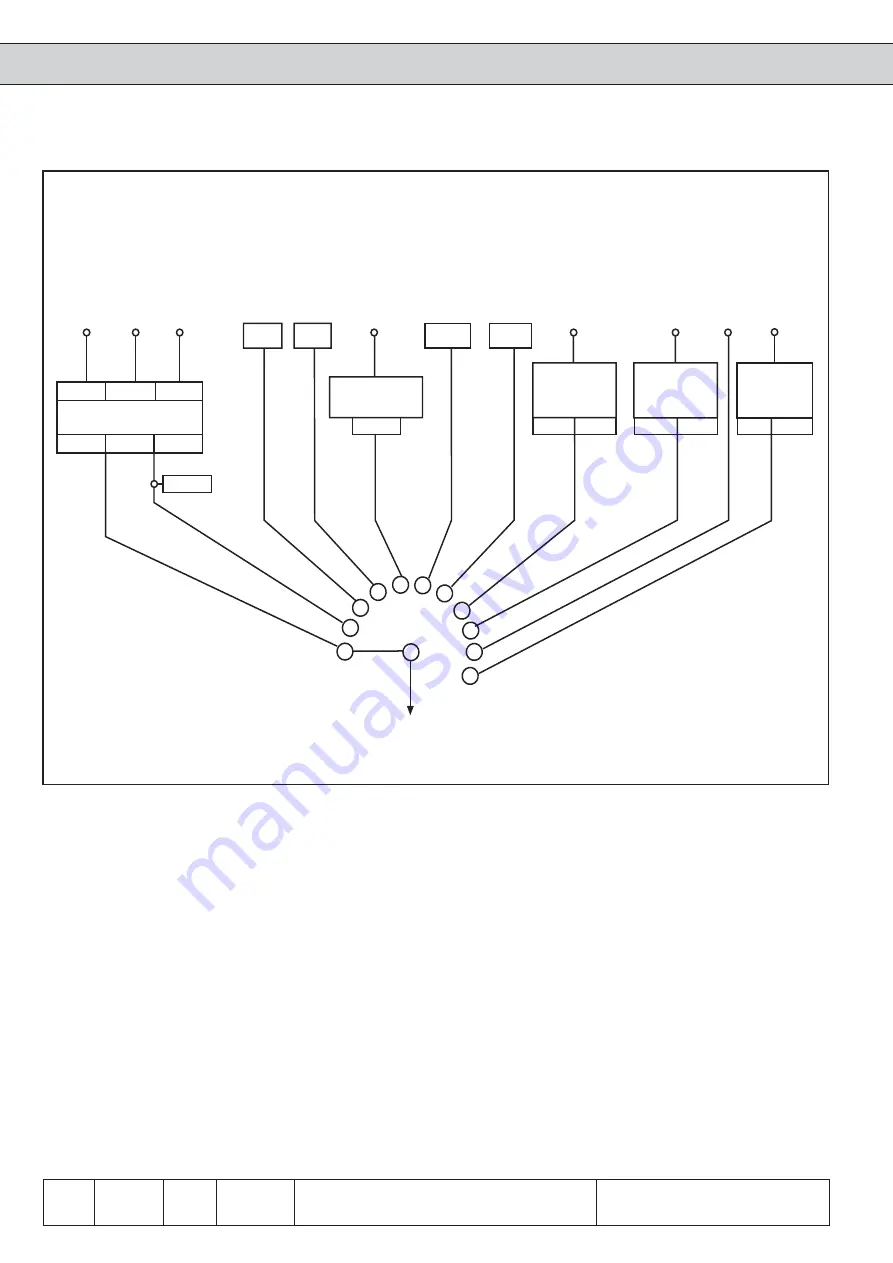
Fig. 6.4.2
Setpoint selection
Analog setpoint
Digital setpoint
see Chap. 6.7
Motorpoti
see Chap. 6.2
Analog input
Motorpoti
AUX
REF
Setpoint limits
With oP.0 it is determined how the setpoint is adjusted.
The analog setpoints are adjusted via AN1, AN2 or AN3 (optional). Chapter 6.2
ÑAnalog In- and Outputsì describes the analog signal processing. The indication
of the setpoints can occur either before or after the signal processing (ru.27...32,
53).
With parameter oP.3 ÑAbsolute digital setpoint adjustmentì a setpointspeed of
-4000... 4000 rpm can be adjusted.
With parameter oP.5 ÑDigital setpoint adjustment in percentì a setpoint of
0 %...±100 % of the minimal speed (oP.6 / oP.7) and the maximal speed (oP.10
/ oP.11) can be adjusted.
With the motorpoti function a setpoint of -100%...0...100% between the limits
adjusted in the parameters oP.6 / oP.7 and oP.10 / oP.11 can be adjusted via
digital inputs (see 6.9.3 ÑMotorpoti functionì).
absolute
in %
System
parameter
Motorpoti function
Analog setpoint
Digital setpoint
Keyboard / Bus
Other setpoints
Terminal strip
Setpoint
selection
AN2
Kl. X2A.3 /
X2A.4
AN1
Kl. X2A.1 /
X2A.2
6.4.2
Reference source oP.0
Output ext.
PID-controller
AN1
direct
Speed
measurement
1
Speed
measurement
2
ref. value
high res.
AN3
(opt.)







































































