

























6
11
1
KEB COMBIVERT F5-M / S
Name: Basis
06.05.04
Section
Page
Date
©
KEB Antriebstechnik, 2002
All Rights reserved
Chapter
Functional Desription
1. Introduction
2. Summary
3. Hardware
4. Operation
5. Parameter
6. Functions
7. Start-up
8. Special Operation
9. Error Assistance
10. Project Planning
11. Networks
12. Annex
Positioning and Synchronous Control
6.1
Operating and Unit Datas
6.2
Analog In- and Outputs
6.3
Digital In- and Outputs
6.4
Setpoint- and Ramp
Adjustment
6.5
Voltage-/Frequency
Characteristic Adjustment
6.6
Motor Data and Controller
6.7
Protective Functions
6.8
Parameter Sets
6.9
Special Functions
6.10 Encoder Interface
6.11 Posi-/ Synchronous Control
and Contouring mode
6.12 Technology Controller
6.13 CP-Parameter Definition
6.11.1
Synchronous Control ............... 3
6.11.2
Slave Correction ..................... 4
6.11.3
Position Controller ................... 5
6.11.4
Position Display ...................... 5
6.11.5
Reference Point Approach ....... 6
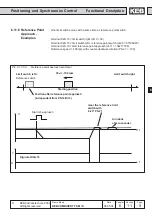
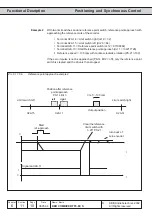
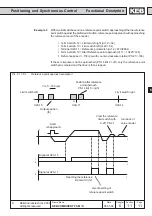
6.11.6
Reference Point Approach
Examples ................................ 7
6.11.7
Posi Control .......................... 12
6.11.8
Position sensing .................... 17
6.11.9
Teach mode .......................... 18
6.11.10 Contouring mode (CTM) ........ 19
6.11.11 Used Parameters .................. 20







































































