

























3 | Product description
KEB Automation KG
14
ma_dr_f6-cu-p-inst-20182705_en
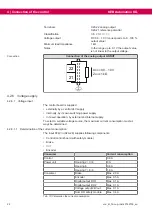
• 8 digital inputs
• 2 digital outputs
• 1 Relay output
• 2 analog inputs (plus 1 switchable analog input)
• 1 analog output
• CAN bus interface
• 24V input and output
3.7 Safety terminal block X2B
The design of the terminal strip X2B depends on the safety module. The description is
given in a separate manual for the safety module.
3.8 Encoder interfaces X3A, X3B
Der COMBIVERT contains two universal encoder interfaces. The interfaces can be adap-
ted independently to different encoders.
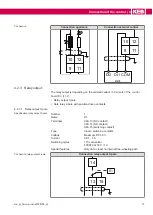
3.9 Diagnostic interface X4A
The integrated RS232/485 interface serves for the connection of service tools (e.g. COM-
BIVIS) displays or the F6 operator. Telegram DIN 66019II is used as communication pro-
tocol.
3.10 Fieldbus interface X4B
The fieldbus interface X4B supports the following protocols:
•
IN (fieldbus; Variant 4 and 5 only)
• Ethernet (fieldbus)
• RS485 potential-free (only variant 3)
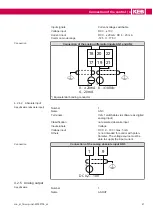
3.11 Fieldbus interface X4C
The fieldbus interface X4B supports the following protocols:
•
OUT (fieldbus; Variant 4 and 5 only)
• Ethernet (fieldbus)
3.12 Rotary coding switch S1, S2
If the CAN protocol is active, the rotary coding switches S1 (low byte) and S2 (high byte)
define the node ID. If both switches are set to "0" or a faulty node ID is set, the node ID
from fb64 is active.
The rotary coding switch is only available at variants 4 and 5.
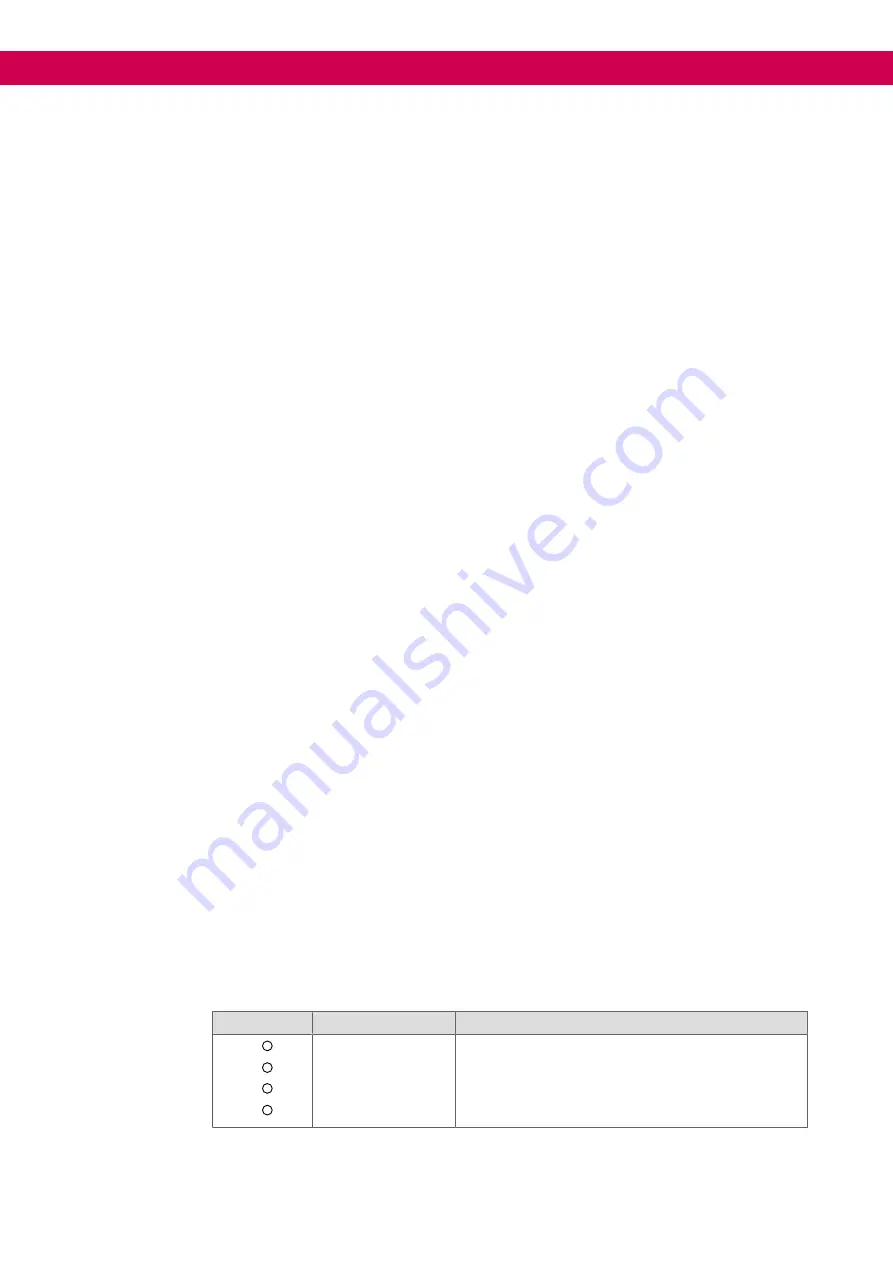
3.13 Status LEDs
3.13.1 Boot display
Before the LEDs start their normal function, they signal the boot procedure after switching
on:
LEDs
Status
Note
VCC
NET
DEV
OPT
ST
ST
off
Device off







































































