


















·
18
·
Transport robots
Therobotis valuableequipment, pleasestrictly followthe below
instructionsto operate whenneed manual transport robots.
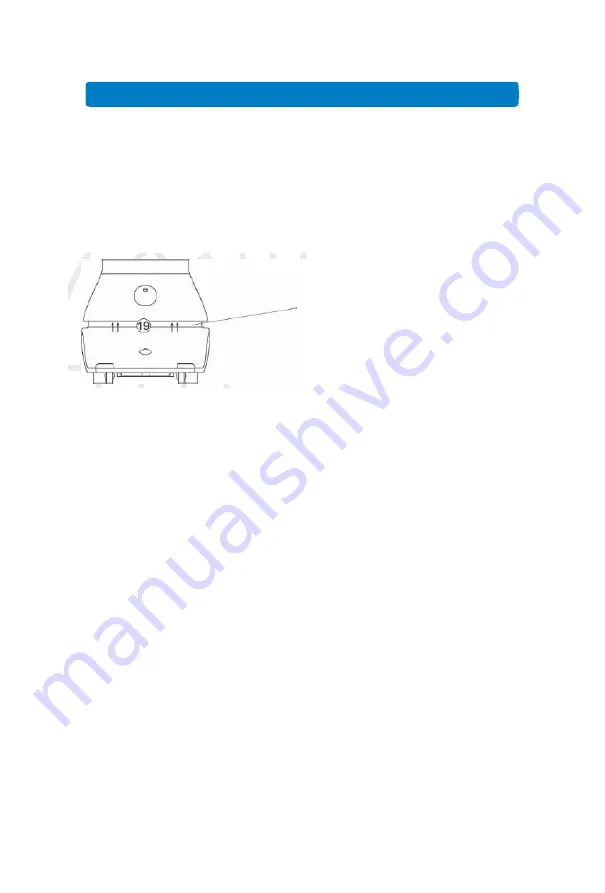
Shown as picture 6, the up part (The arrow appointed surface) at robot laser
layer gap can be stressed, you can up lift the robot through these part. Please use
hand lift the up part of laser layer when transporting, please note that always
keep robot be at up-right gesture during transporting.
Note:should use hand buckle the laser
layer gap between body and base
during transporting the robot.
Picture 6 Transporting diagram
* Note:
The above laser layer gap is the only one stressed part for transporting. Please
transporting robot strictly follow the instruction. Strictly forbid directly drag and lift
the bottom o
f robot during transporting; strictly incline the robot; strictly forbid directly
drag and lift face and head of robot. Users self duty for the damage of robot which
caused by the incorrect operation during transporting.
Summary of Contents for PEANUT
Page 1: ...PEANUT intelligent transporting robots Product specification...
Page 6: ...7 to...
Page 7: ...8 the entity...
Page 10: ......






























































