





























62
3.2.4 Ultrasonic Obstacle Avoidance
In this product, we will integrate the ultrasonic module and steering engine together and make the two
parts working at the same time, which greatly increases the effectiveness of the data and the flexibility of the
car, the main working flow: When the power is on, steering engine will automatically rotates to 90 degrees,
the MCU will read data from the reflected ultrasonic. If the data is greater than the security value, the car
will continue to drive forward, otherwise the car will stop, then the steering engine will rotate 90 degrees to
the right. After that, the MCU reads data from the reflected ultrasonic again, the steering engine rotates 180
degrees to the left, then reading data again, the steering engine rotate 90 degrees, the MCU will contrast the
two detected data, if the left data is greater than the right data, the car will turn left, otherwise turn right, if
the two data are both less than the safety value, the car will turn around.
3.2.4.1 Suite Introduction
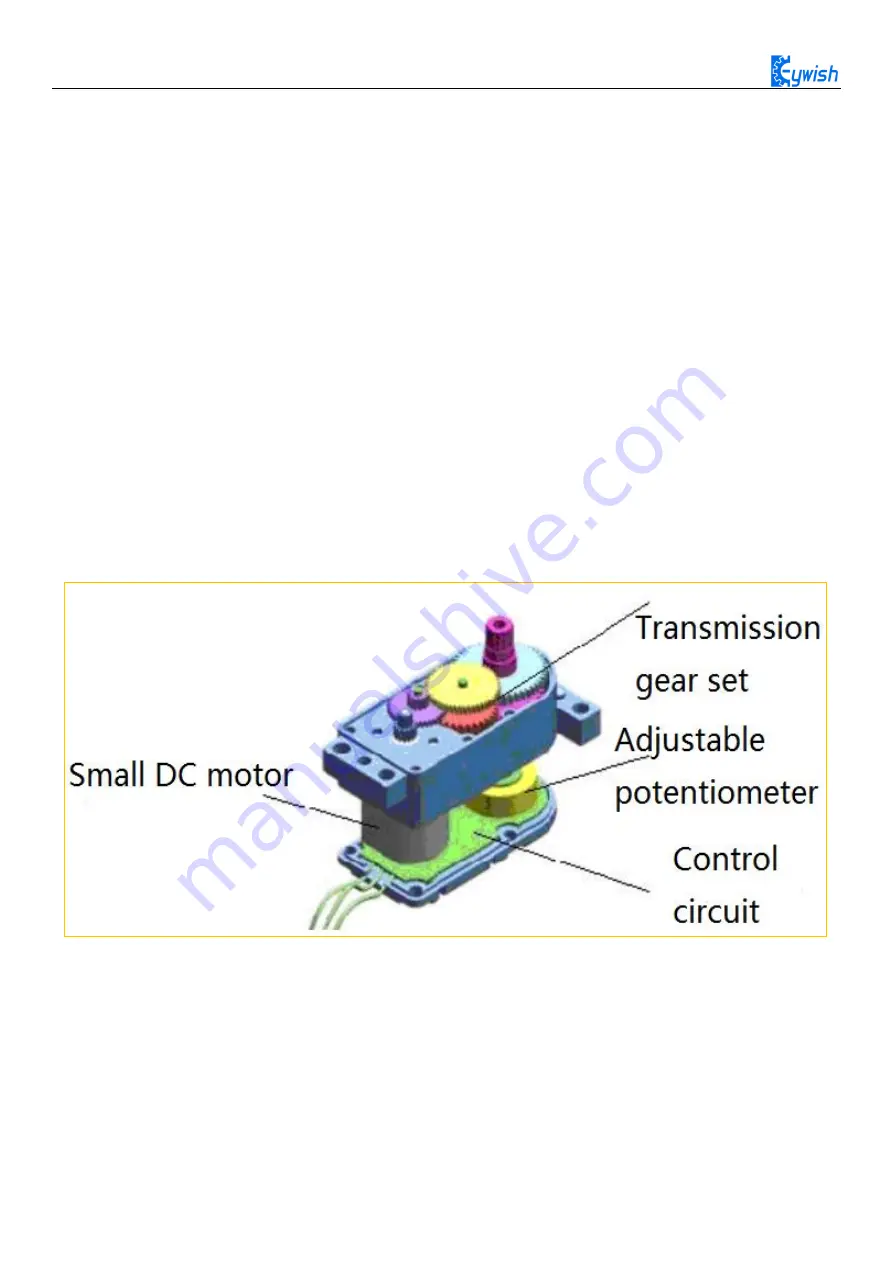
1. The steering gear
The steering gear is mainly composed of the following parts in general, steering wheels, gear group,
position feedback potentiometer, DC motor and control circuit (shown in Fig.3.2.24). Fig.3.2.25 shows the
most commonly used 9G steering gear now.
Figure .3.2.24 Diagram of Steering Gear
Summary of Contents for Hummer-Bot-1.0
Page 1: ...Hummer Bot 1 0 Instruction Manual V 2 0 ...
Page 18: ...15 Step4 You need to install motors Figure 3 1 5 Schematic diagram of motor installation ...
Page 50: ...47 Figure 3 2 15 Diagram of Data without Obstacles ...
Page 83: ...80 Test code Path hummer bot Lesson ModuleDemo IrkeyPressed IrkeyPressed ino ...






































































