
















V2.0
28
SET
▲
▼
▲
▼
▲
▼
▲
Stiffness
Write
“
1
”
to start inertia
ratio measuring
Measuring Distance,unit is 0.01 cycle
Inertia ratio, unit is 0.1
Write 1 to save all the parameters
Write 2 to save all the parameters and restart servo
显示如右图
MODE
MODE
Circle
SET
SET
Long Press MODE
▼
LED is blinking,
Press MODE can shift. the
parameters below display in
the same way.
Confirm the parameter ,the first
dot on the right will lighten. the
parameters below display in the
same way.
SET
SET
SET
SET
SET
SET
adjusted by “▼▲”level by level and
will be valid immediately
SET
Long Press MODE
Long Press MODE
Write automatically after inertia measuring.
Or written by user.
adjusted by “▼▲”level
by level and will be valid immediately
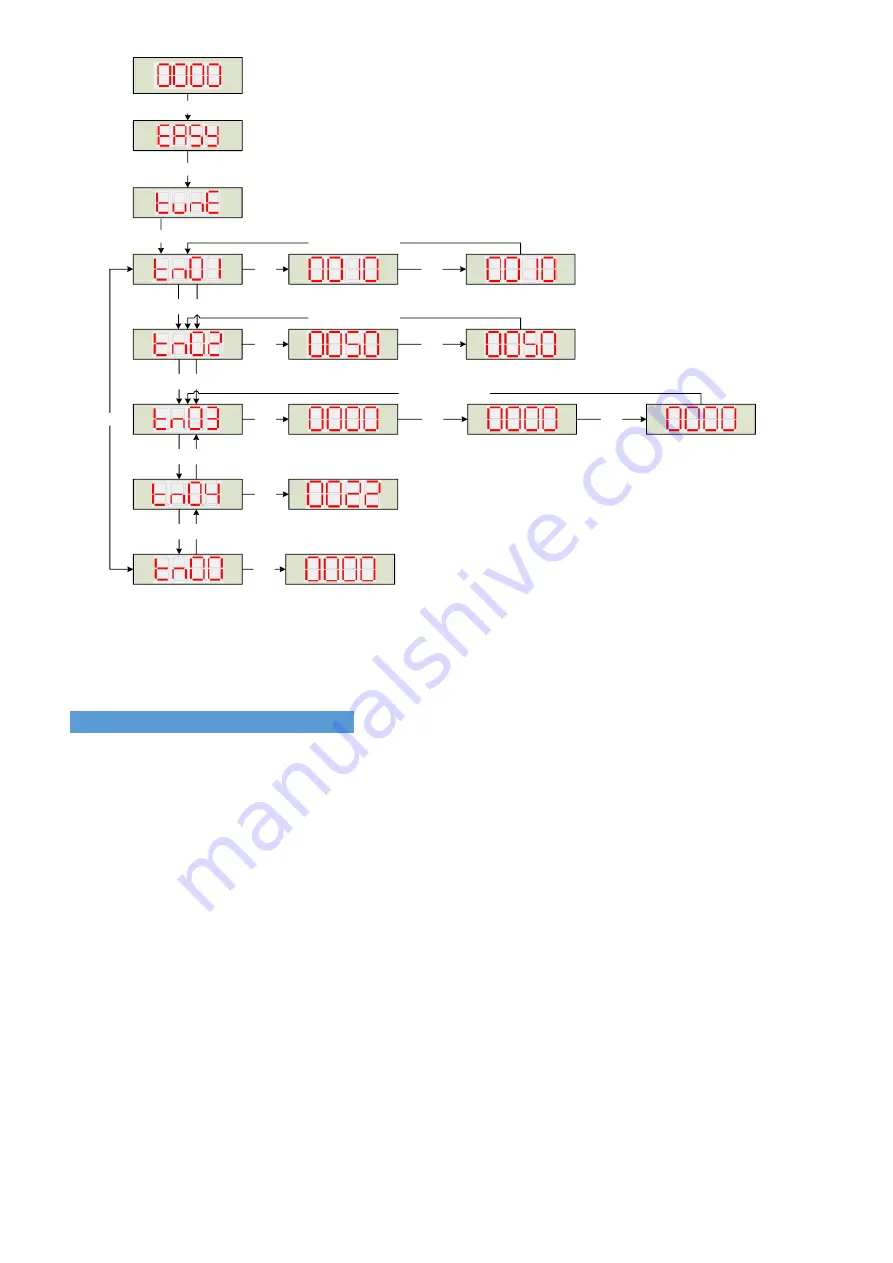
Figure 3-3 TunE flow chart
Notice: The data will be valid immediately, but need to be saved by tn00.
For safety, when setting tn01 or tn02, the data will be valid immediately, and these two parameters should
be set level by level.
3.5 Commissioning instructions
Digital panel trial operation steps
⚫
Press “MODE”
,
Enter F004
,
Select object address“d4.18”
,
Confirm the motor model
;
⚫
Press “MODE” to enter F000 group,
select the object address "d0.02" and set the target
speed.
,
Its unit is RPM
;
; It is recommended to run at a speed lower than 100RPM to avoid
personal injury and property damage.
;
⚫
Press “MODE” to enter F006 group and conduct key test. The default value is d
6.40. Use
"▼" to adjust the data to d6.31 first, then press "▼" to automatically change the data to
d6.15, and then use "▲" to adjust the data to d6.25
;
;
⚫
Press “SET“ [originally ENTER] and the trail operation is activated. At this time, the digital
tube is
displayed as "abc.d" and the motor is in a loose shaft state. When "▲" or "▼" is
pressed for a long time, the motor will be automatically enabled and will operate according
to "+target speed" or "-"target speed ",respectively. During the process of trail operation,
the digital tube will display the motor speed in real time.
⚫
The default counterclockwise direction of the motor is forward rotation (viewed from the
direction facing the motor shaft). If the direction cooperation of the machine does not meet
with the requirements, the default rotation direction of the motor can be changed by
changing the speed position direction control of F002 group object address "d2.16". The
default value of "d2.16" is 0. Changing to 1 will change the default rotation direction.







































































