





























43
The overload protection is disabled. Be careful to use
this function because the drive will not protect the motor
when overload occurs.
1:Common motor (with low speed compensation)
Since the cooling effects of common motor deteriorates
at low speed (below 30Hz), the motor’s overheat
protecting threshold should be lowered, which is called
low speed compensation.
2: Variable frequency motor (without low speed
compensation)
The cooling effects of variable frequency motor is not
affected by the motor’s speed, so low speed
compensation is not necessary.
A8.04 Auto reset times
0
~
100
【
0
】
A8.05 Reset interval
2.0
~
20.0s
【
5.0s
】
Auto reset function can reset the fault in preset times and
interval. When A8.04 is set to 0, it means “auto reset” is
disabled and the protective device will be activated in
case of fault.
Note:
The IGBT protection (E010) and external equipment
fault (E015) cannot be reset automatically.
A8.06 Fault locking
function selection.
0
~
1
【
0
】
0:Disable.
1:Enable.
6.10 Group b0
b0.00 Rated power
0.4
~
999.9kW
【
dependent on
drive’s model
】
b0.01Rated voltage
0~rated volotage of drive
【
dependent on drive’s
model
】
b0.02 Rated current
0.1
~
999.9A
【
dependent on
drive’s model
】
b0.03 Rated frequency
1.00
~
300.00Hz
【
dependent
on drive’s model
】
b0.04 Number of
polarities of motor
2
~
24
【
4
】
b0.05 Rated speed
0
~
60000RPM
【
1440RPM
】
These parameters are used to set the motor’s parameters.
In order to ensure the control performance, please set
b0.00~b0.05 with reference to the values on the motor’s
nameplate.
Note:
The motor’s power should match that of the
drive.Generally the motor’s power is allowed to be
lower than that of the drive by 20% or bigger by 10%,
otherwise the control performance cannot be ensured.
b0.06 Resistance of
stator %R1
0.00
~
50.00
%【
dependent
on drive’s model
】
b0.07 Leakage
inductance %Xl
0.00
~
50.00
%【
dependent
on drive’s model
】
b0.08 Resistance of
rotor %R2
0.00
~
50.00
%【
dependent
on drive’s model
】
b0.09 Exciting
inductance %Xm
0.0
~
2000.0
%【
dependent
on drive’s model
】
b0.10 Current without
load I0
0.1
~
999.9A
【
dependent
on drive’s model
】
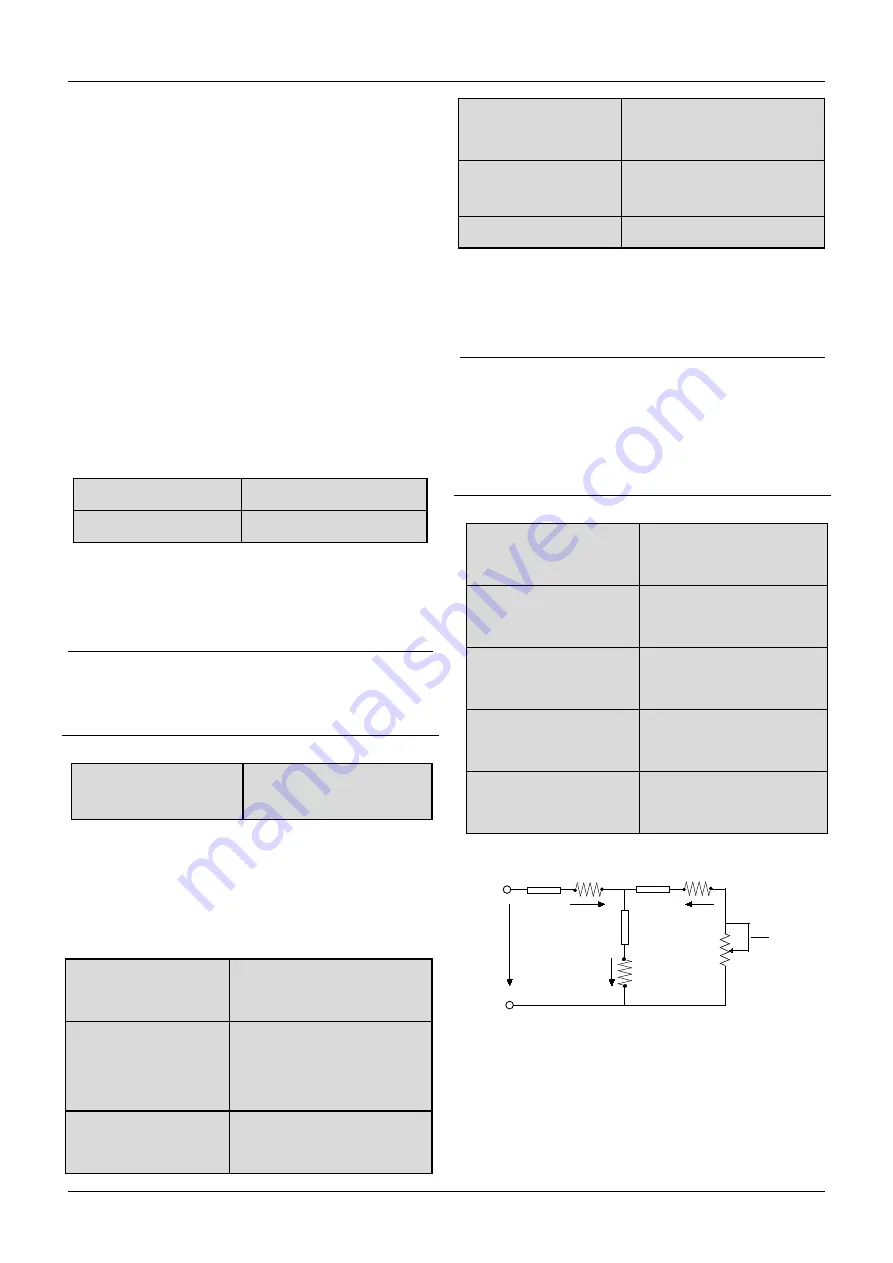
See Fig. 6-32 for the above parameters.
R
1
jX
11
R
2
jX
21
I
1
I
2
I
0
X
m
U
1
1-S
S
R
2
Fig. 6-32 Motor’s equivalent circuit
In Fig. 6-32, R1, X1l, R2, X2l, Xm and I0 represent
stator’s
resistance, stator’s leakage inductance, rotor’s resistance,
rotor’s leakage inductance, exciting inductance and
current without load respectively. The setting of b0.07 is







































































