


























KINOVA
®
Gen3 Ultra lightweight robot
User Guide
136
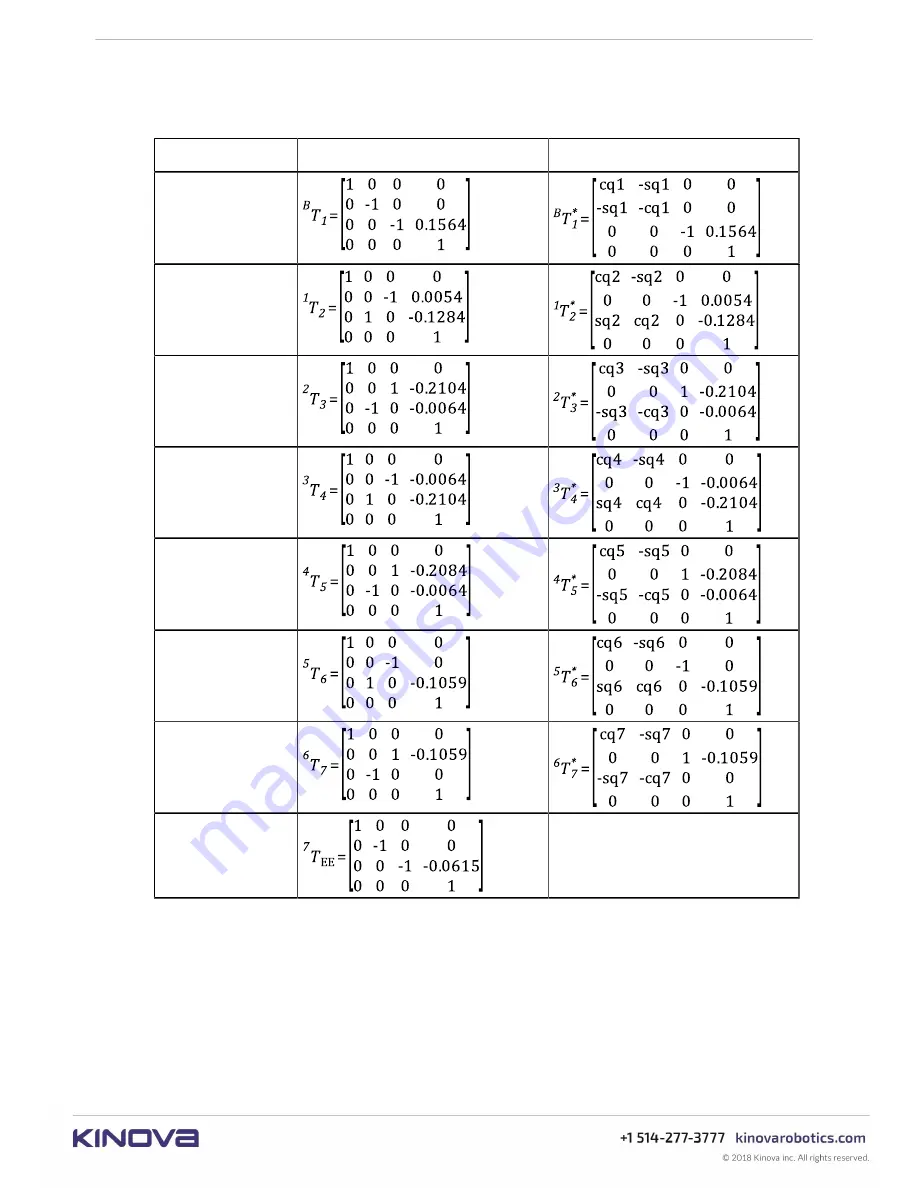
Frame 1 to frame 2
Frame 2 to frame 3
Frame 3 to frame 4
Frame 4 to frame 5
Frame 5 to frame 6
Frame 6 to frame 7
Frame 7 to end
effector
Note:
units are in meters for homogeneous transform translations in the right-hand column of
each matrix.
Transformation
i-1
T
i
i-1
T
*
i
Base to frame 1
Table 38: Transformation matrices







































































