

























KINOVA
®
Gen3 Ultra lightweight robot
User Guide
137
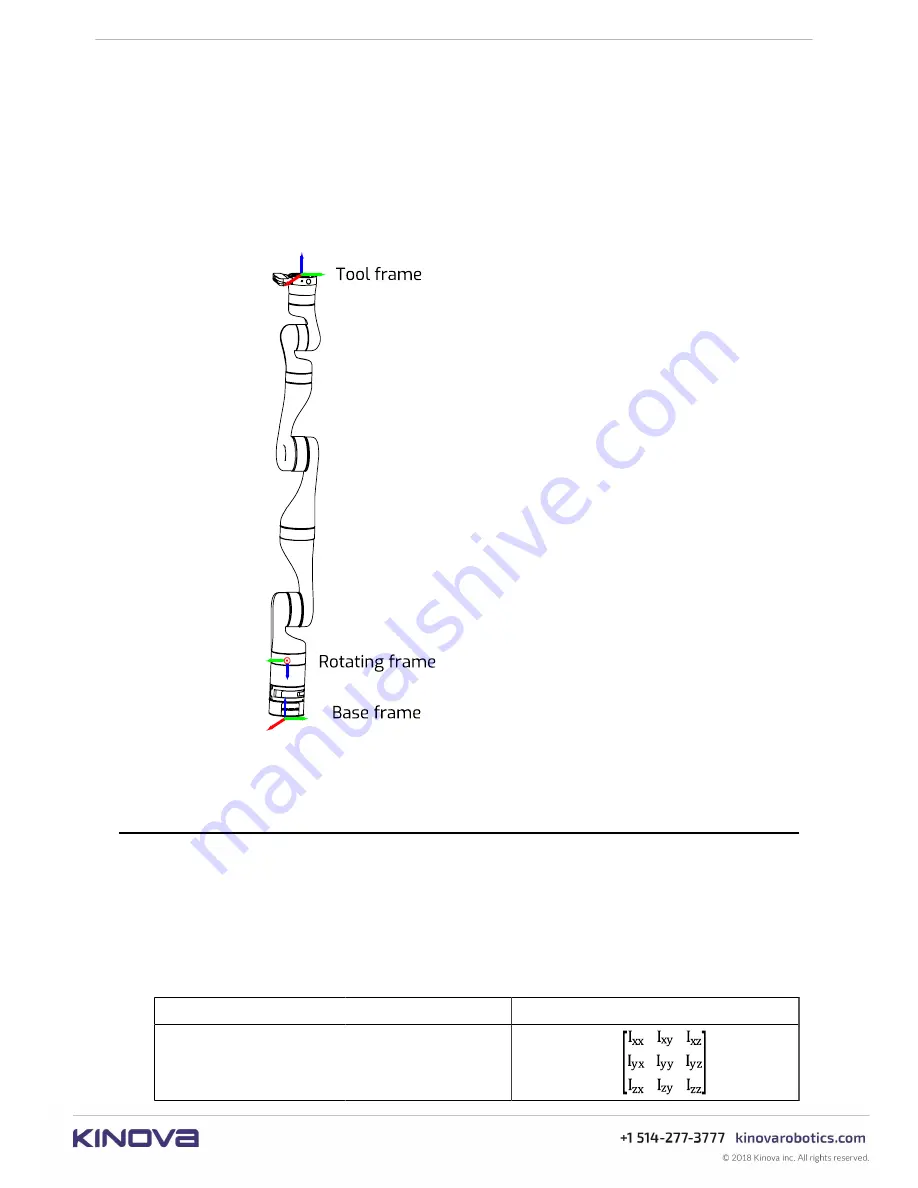
Figure 7
1
: Three standard frames
Different control modes make use of different frames.
Dynamic parameters of the 7 DoF robot
This section describes the dynamic parameters of the 7 DoF robot.
Overview
The following tables describe the key dynamic parameters of the link segments of the 7 DoF
robot, including masses, centers of masses, and and moment tensors (moments of inertia). The
center of mass of a link is always expressed in the coordinates of the precedent joint frame.
The mass of a link segment includes the shell and portions of the input and output actuators (as
applicable) that are enclosed within the link and move rigidly with the link.
Overview
moments of inertia taken at the center of mass
and aligned with the output coordinate system
I
=
Standard robot frames
This section describes the standard frames of the robotic arm.
The robot has three standard frames:
• base frame (base reference frame)
• rotating frame (actuator 1 reference frame)
• tool frame (end-effector reference frame)







































































