















KINOVA
®
Gen3 Ultra lightweight robot
User Guide
147
Safety
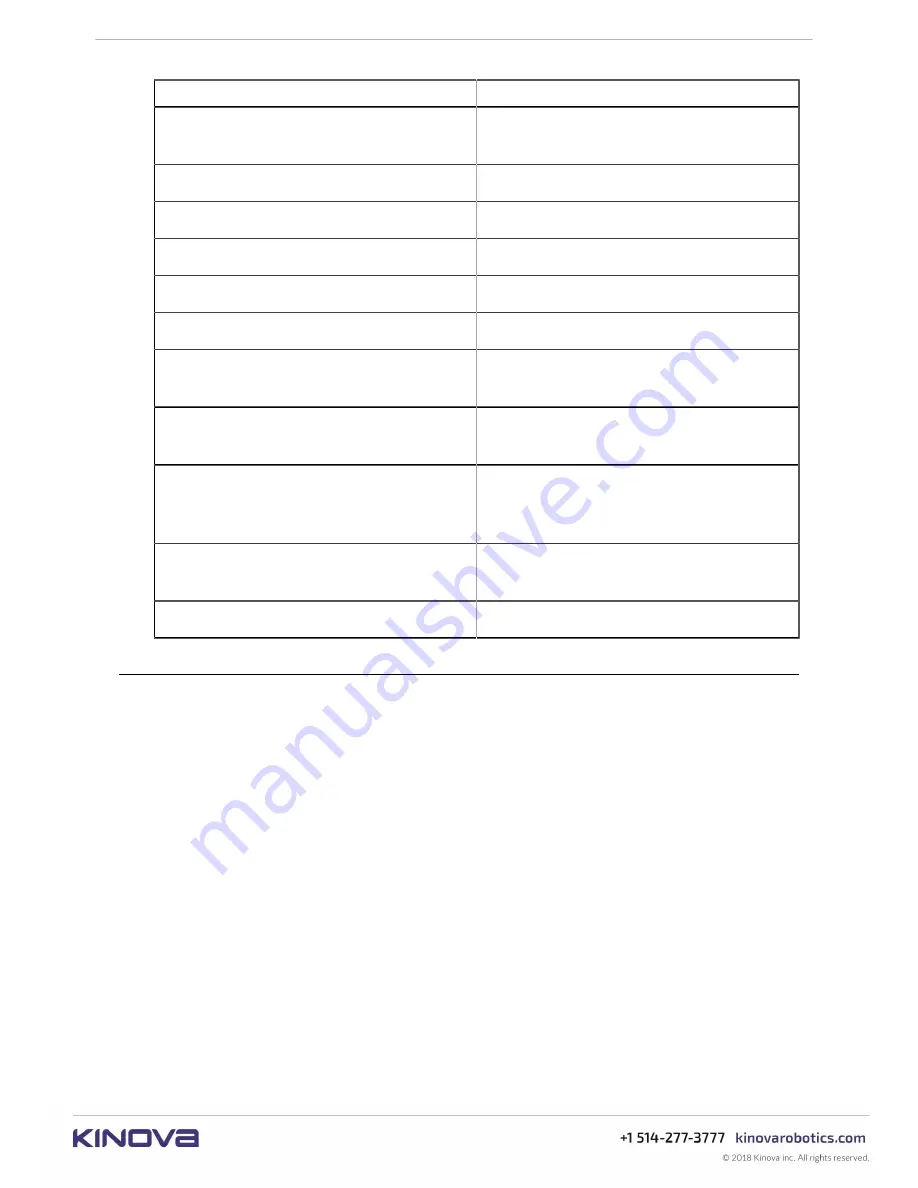
Most Probable Cause
Maximum torque
• Strain gauge improperly soldered
• Incorrect torque calibration
Magnetic position
• Magnet improperly glued
Hall position
• Hall sensor major malfunction
Hall sequence
• Hall sensor major malfunction(s)
Input encoder Hall mismatch
• Dirt and/or particles on encoder disk
Input encoder index mismatch
• Dirt and/or particles on encoder disk
Input encoder magnetic mismatch
• Dirt and/or particles on encoder disk
• Detached magnet on magnetic encoder
Maximum motor current
• Shorted phases
• Bad motor
Non-volatile memory corrupted
• Incomplete calibration(s
• No system information entered
• No torque calibration
Motor driver fault
• Shorted phases
• Hall sensor issue
Watchdog triggered
• Firmware issue
Contacting Kinova support
Here's where to turn for related support and advice.
For support and advice on hardware related issues, please don't hesitate to contact us through
the support form on our website:
www.kinovarobotics.com/support
.
For development guidance and software-related questions, check out the
KINOVA
®
KORTEX™
and KINOVA
®
KORTEX™ ROS
GitHub
repositor
ies
at:
github.com/kinovarobotics/kortex
github.com/kinovarobotics/ros_kortex


































































