





























KINOVA
®
Gen3 Ultra lightweight robot
User Guide
56
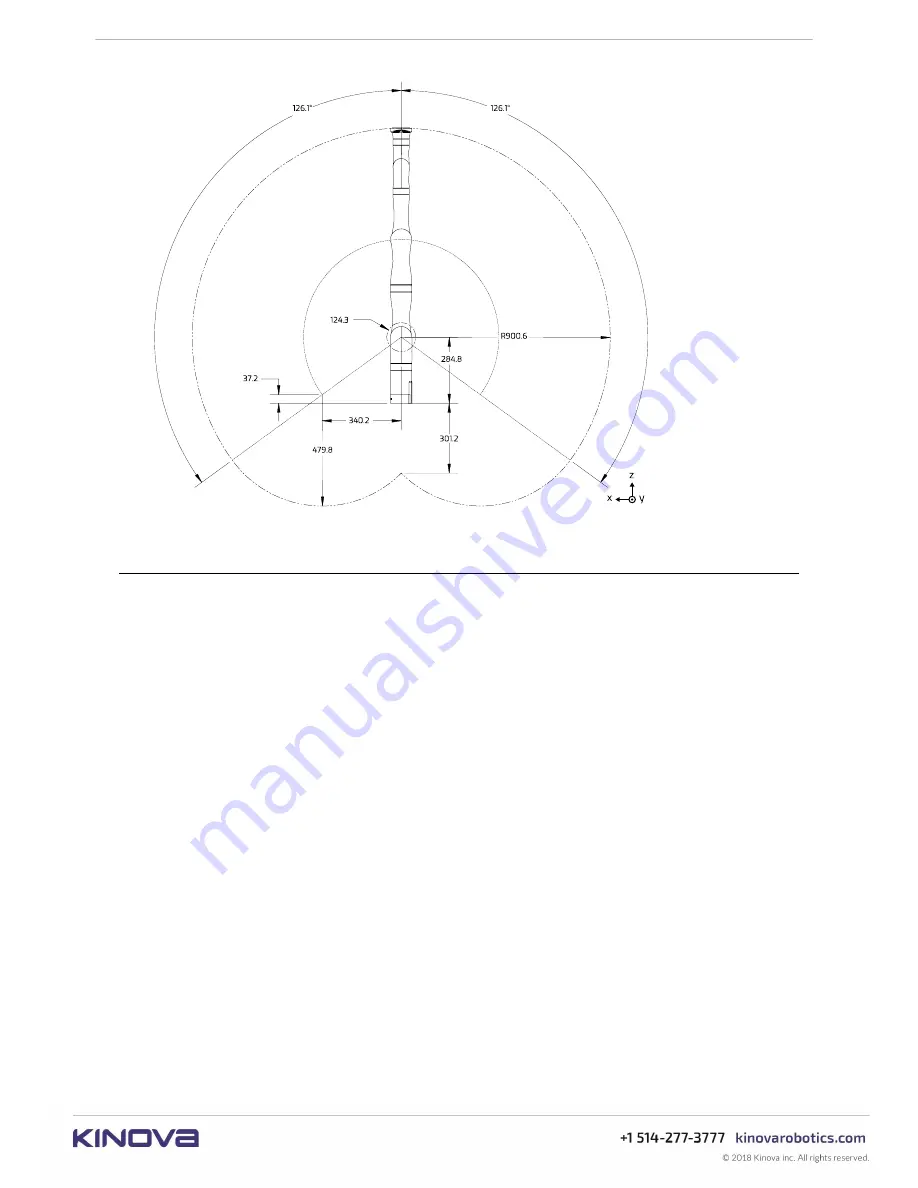
Figure 21: 7 DoF robot nominal workspace (measurements in mm)
Payload vs. workspace
This section describes the variation of payload over the workspace and depending on the
type of use.
Overview
The payload of the robot is the maximum mass that the robot can hold up at the end effector.
This is generally not one constant figure, but will depend on a few factors.
• radial distance from the base - the payload will be highest closest to the base, and will go
down as the end effector gets farther out from the base axis.
• temporary vs. continuous - the robot will have a maximum payload that can be handled
temporarily for a short period of time. However, continued use of the arm with that payload
for an indefinite period will cause the arm to heat up, as the heat generated by the strain on
the actuator exceeds the rate at which heat can be dissipated. However, a smaller mass can
be handled for an indefninite period. This is referred to as the continuous payload limit.
The payload will also depend on whether a gripper is attached or not, with some of the payload
capability reduced to lift the weight of the gripper.







































































