


























3-16
FUNCTION SETTINGS
6. HOIST AUTO UP
The Transducer unit can be retracted automatically when the ship speed is over a
specified speed by connecting to an external equipment.
•
Each press of [
←
] or [
→
] key changes the setting,
“OFF, 10kt (18km/h).”
•
Select the desired value.
•
Use the Tilt Key [
↑
] or [
↓
] to change the speed after selecting the initial value 10 kt (18
km/h). Selectable values : "1 kt to 15 kt" or "1 km/h to 27
km/h”
Tilt key [
↑
] : increases the value
Tilt key [
↓
] : decreases the value
•
Transducer unit position mark shows the down direction
[downward arrow] on the left bottom of the screen while
the Transducer unit is lowering. When the HOIST Auto
Up function is activated, the mark changes into [upward
arrow]. The Sensor Lamp goes off when the Transducer
unit is retracted automatically.
We recommend the ship speed below 15kt (27km/h) while retracting.
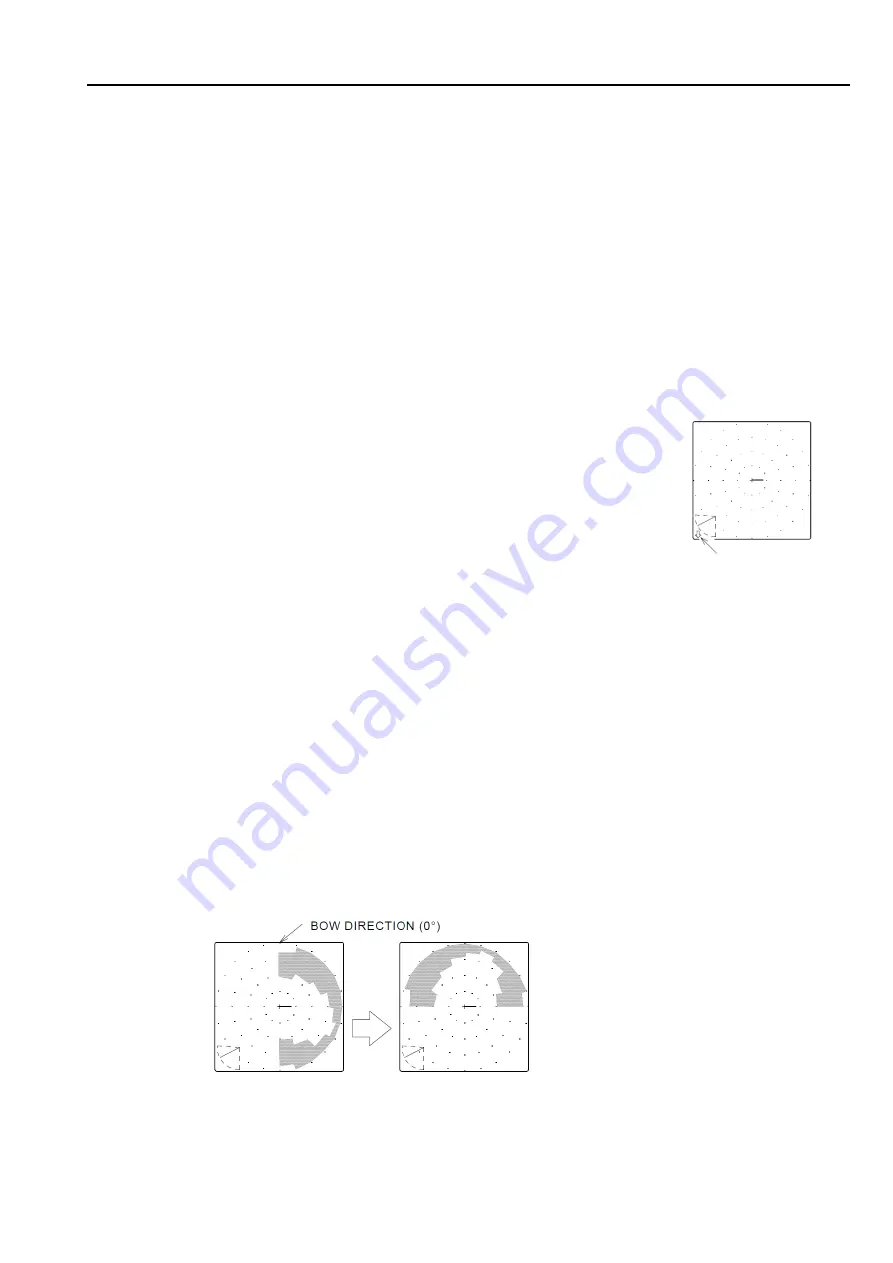
7. TRAIN CORRECT
Shows the
Transducer unit
position, lowering or
raising.
To adjust the deviation of the bow direction (0°), the following procedure is required.
•
In the Sonar mode, use [
←
] or [
→
] key to set the Bearing toward Bow direction.
•
Press the Menu key, and select OTHERS.
•
Highlight
“TRAIN CORRECT.”
•
Press [
←
] or [
→
] key to display the degree that you have set in the Sonar mode.
[EXAMPLE]
Set the bearing at 90°, the display
turned 90° counterclockwise.
•
Releasing this function, set the current bearing at 0° and follow the above procedure.
Summary of Contents for ESR-145
Page 1: ......
Page 2: ......
Page 3: ......
Page 4: ......
Page 6: ... This page intentionally left blank ...
Page 14: ...8 This page intentionally left blank ...
Page 59: ... This page intentionally left blank ...
Page 62: ...4 3 INSTALLATION DIMENSIONS HULL UNIT DISPLAY UNIT Unit mm inch ...
Page 75: ... This page intentionally left blank ...
Page 85: ......
Page 86: ......





















































