


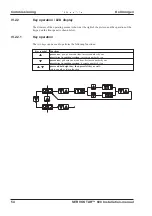












P
P-controller
Control loop with purely proportional behaviour
Phase shift
Compensation for the lag between the electromagnetic
and magnetic fields in the motor
PID-controller
Control loop with proportional, integral and
differential behaviour
PID-T2
Filter time constant for the speed controller output
Position controller
Regulates the difference between the position setpoint
and the actual position to 0
Output : speed setpoint
Potential isolation
Electrically decoupled
Power contactor
System protection device with phase monitoring
Pulse power of the regen circuit
Maximum power which can be dissipated in the
regen circuit
R
Regen circuit
Converts superfluous energy, which is fed back
during braking, into heat in the regen resistor
Reset
New start of the microprocessor
Resolver-digital converter
Conversion of the analog resolver signals into
digital information
Reversing mode
Operation with a periodic change of direction
Ring core
Ferrite rings for interference suppression
ROD-Interface
Incremental position output
S
Servo amplifier
Control device for regulating the position of a
servomotor
Setpoint ramps
Limits for the rate of change of the speed setpoint
Short to ground
Electrically conductive connection between a
phase and PE (protective earth)
Short-circuit
here: electrically conductive connection between
two phases
Speed controller
Regulates the difference between the speed setpoint
and the actual value to 0
Output : current setpoint
SSI-interface
Cyclic-absolute, serial position output
Supply filter
Device to divert interference on the power supply
cables to PE
T
T-tacho, tachometer time constant
Filter time constant in the speed feedback
of the control loop
Tachometer voltage
Voltage proportional to the actual speed
Thermostat
Temperature-sensitive switch built into the
motor winding
Tn, I-integration time
Integral section of a control loop
Z
Zero pulse
Output once per turn from incremental encoders,
used to zero the machine
SERVOSTAR™ 600 Installation-manual
65
Kollmorgen
02.99
Appendix







































































