10.1.1 Use as directed
Safety functions are intended to reduce the risk of the machine operation to the required tol-
erable risk. To achieve functional safety, the wiring of the safety circuits must meet the
safety requirements of IEC 60204, ISO 12100 and ISO 13849.
The network, where the drive is connected to, must be secured according to state-of-the-
art information technology security requirements.
The user IT specialists shall analyze whether further security requirements are applic-
able to ensure functional safety.
The drive firmware can be updated. The parameter sets must be reloaded, verified and
proof tested before normal operation is started.
In certain types of machinery, two motors drive a single mechanical axis. It is the
responsibility of the user to ensure that a fault reaction on the first motor-drive set is also
carried out on the second motor-drive set and vice-versa. Safe I/O and/or a safe field bus
such as FSoE can be used to achieve this.
Beta drives: Safety functions are neither approved nor certified yet. Do not use this func-
tionality in applications with functional safety request until further notice.
10.1.2 Prohibited use
The safety functions must not be used if the drive is to be made inactive for Emergency-Off
situations. In an Emergency-Off situation, the main relay is switched off (by the Emergency-
Off button).
The STO function requires two-channel control if the performance level SIL2 / PLd Cat.3 in
the system is to be achieved. The connection of a constant 24 VDC voltage to one of the
STO inputs is not permitted if the safety function is to be used.
The device does not require maintenance. Opening the device voids the warranty. In case of
damage or malfunction the drive must be sent for repair or must be replaced.
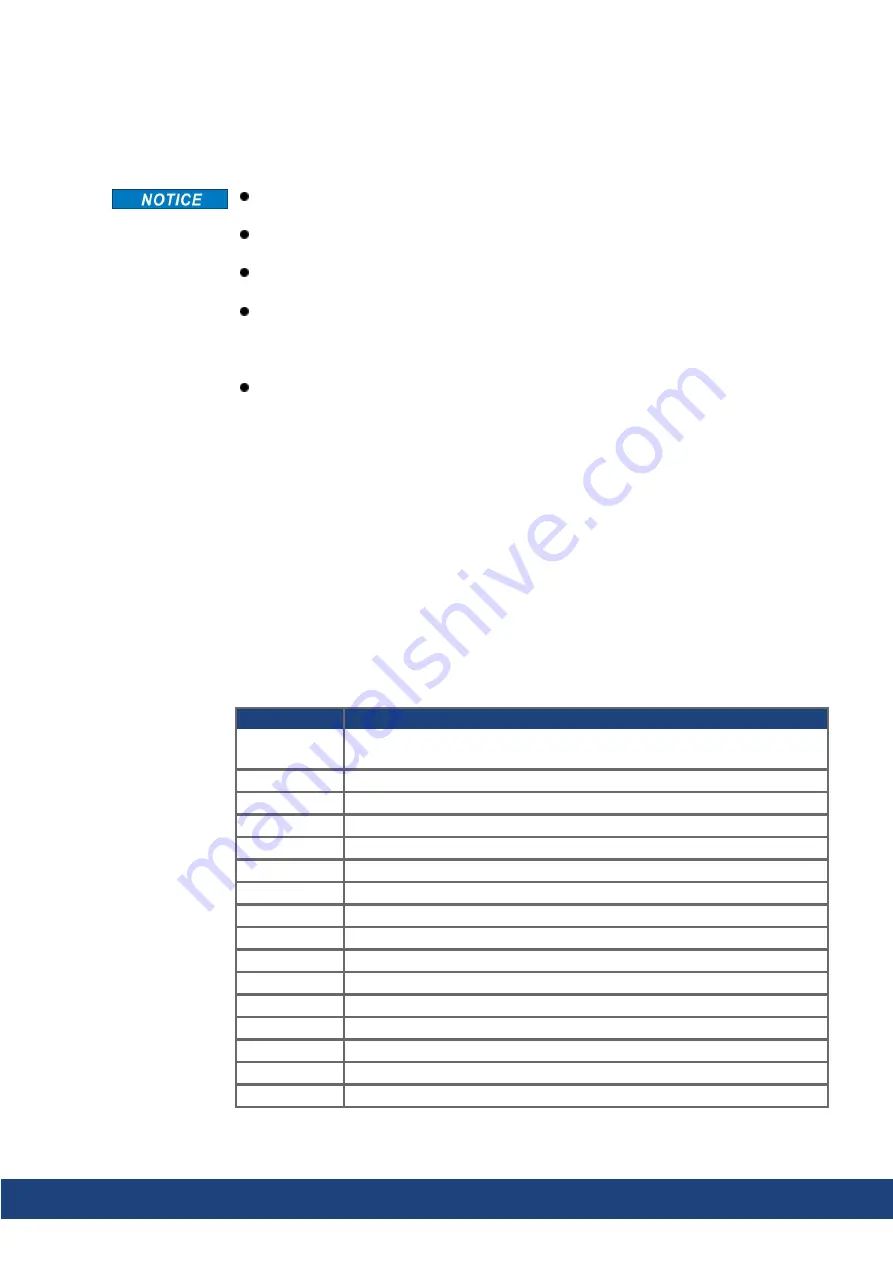
10.1.3 Abbreviations used for functional safety
More abbreviations see (
Abbreviation
Meaning
A#, AXIS#
A# or AXIS# are placeholders for the axis number. Used with parameters
(AXIS#.SAFE.STO.ACTIVE) or signal names (STO-A-A#)
(
➜
# 53)
"see page 53" in this document
➜
xyz
"see chapter xyz" in this document
CCF
Common cause failure
FS1
Functional Safety Option 1 (STO)
HFT
Hardware fault tolerance
MTTFd
Mean time to dangerous failure
OSSD
Output Switching Signal Device
PELV
Protective Extra Low Voltage
PFHd
Probability of dangerous failure per hour
PL
Performance Level
SC
Systematic Capability
SFF
Safe failure fraction
SIL
Safety Integrity Level
STO
Safe Torque Off
TM
Mission time
AKD2G-S Installation Manual, Safety 1 | 10 Safety Manual
Kollmorgen | kdn.kollmorgen.com | S102, April 2020
135