





























10.3.3 STO (Safe Torque Off)
S
afe
T
orque
O
ff description for drive option Functional Safety 1.
STO is suited for SIL 2 according to IEC 62061 and PLd / Cat.3 according to ISO 13849-1.
STO is a type A subsystem according to IEC 61508.
STO turns off the drive output stage that powers the motor. STO function corresponds to an
uncontrolled braking according to IEC 60204-1, category 0.
10.3.3.1 Important Notes
The safety properties given in this documentation refers to the device AKD2G with func-
tional safety option 1. The user has to determine the safety properties of the safety chain.
Vertical load could fall!
Serious injury could result when a suspended load is not properly blocked. The drive cannot
hold a vertical load when STO is active.
Add a safe mechanical blocking (for instance, a motor-holding brake).
10.3.3.2 Activation
The digital STO inputs (channel A and B) must be connected to the output of a safety device,
which at least meets the requirements of PLd, Cat. 3 according to ISO 13849. Technical data
of the safe inputs (
If one of the STO inputs goes open-circuit or 0 V, then power supply to the motor stops within
3.5 ms. The motor will lose all torque and coast to a stop.
If the drive detects that the two STO inputs are in a different state for longer than 100 ms,
then a simultaneity fault F9005 occurs (
Review the enclosure and wiring instructions (
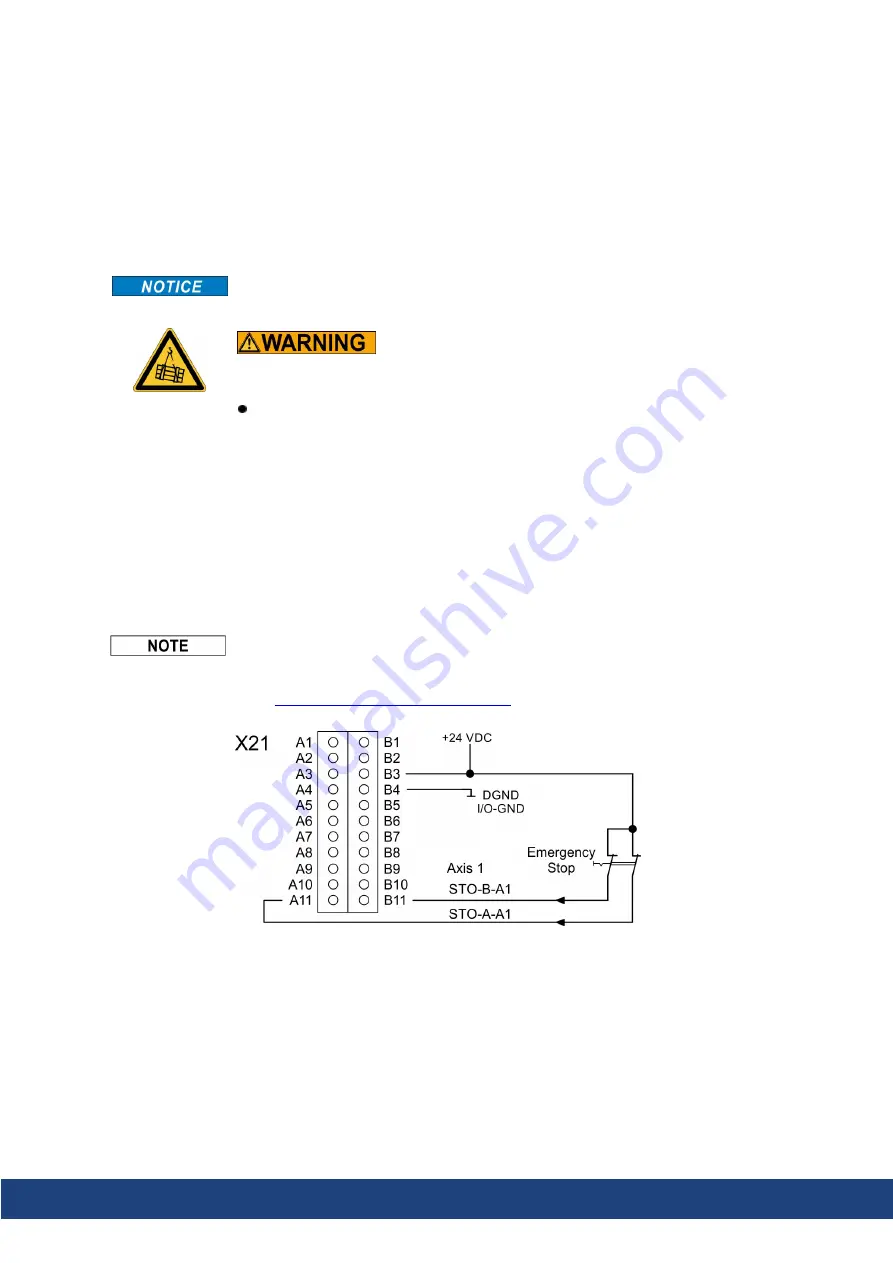
Wiring example STO single axis, SIL2/PLd, Emergency Stop
Note:
should be set to 1 if STO is activated by a
switch.
AKD2G-S Installation Manual, Safety 1 | 10 Safety Manual
Kollmorgen | kdn.kollmorgen.com | S102, April 2020
139







































































