





























35
Combination
E
F
G
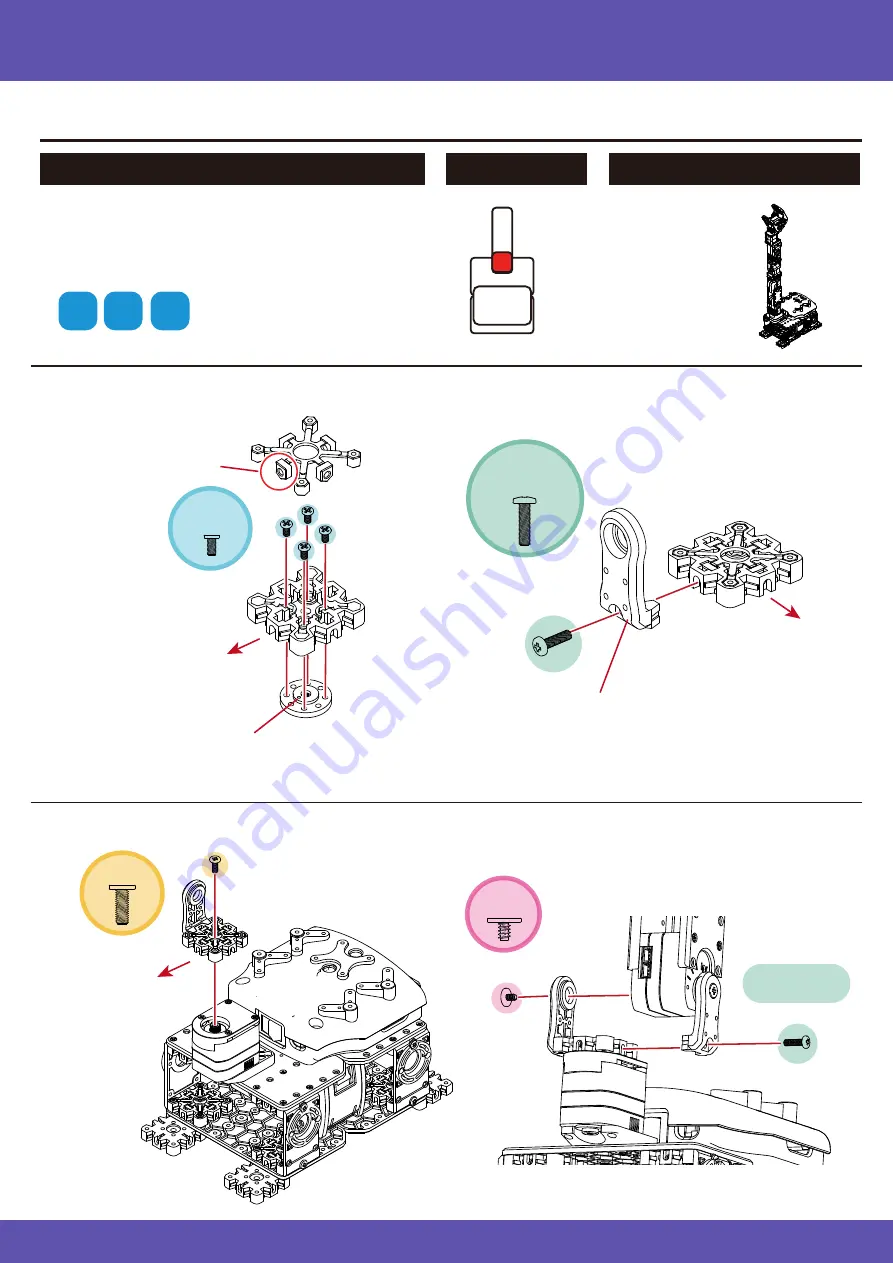
◯Joint base x1
◯Joint nut x1
◯Bottom arm 3300-26 x1
◯Cable guide X x1
◯Horn B x1
◯M2 ー 4 x4
◯M2 ー 6 x1
◯M2.6 ー 10 x2
◯M3 ー 8 x1
◯2.6 ー 4 x1
◯ZH Connection cable 2
120mm x1
160mm x1
④
③
2.6 ー 4
M2.6 ー 10
M2 ー 4
x4
①
②
Joint nut
Bottom arm 3300-26
Joint base
Horn B
Make sure the arm is installed
so that the origin faces the front.
Front
Front
Front
M2.6 ー 10
M3 ー 8
*It would be helpful to
mark the origin side
with a marker, etc.
*The origin side can
be cut to mark it.
■
Atach the arm.
Assemble part
Assembly parts completed
Parts used
Parts Combination 1
Joining
KXR-A5
Summary of Contents for KXR KXR-A5
Page 58: ......







































































