


















4
Preface
Thank you for purchasing the KXR robot assembly kit.
The KXR system enables you to create various robots by combining frame parts
with servo motors as a part of the structure. The basic format is provided as a set,
and sample motions are also included, so you can confirm the robot's operations
as soon as it is assembled. Servos and main frame part components are sold as
options, so it is easy to add robots in various formats and also expand the original
robot. If parts wear out or break you can replance only those you need, so repairs
can also be performed inexpensively.
Before beginning to assemble the robot, please closely read through this manual
and the accessory manuals. You may want to print out the manuals to make them
easier to read and reference.
This product is constructed for people of all ages to enjoy a bipedal robot. However, this product is not a toy, and
contains parts and tasks that would be difficult for young children to understand or perform. For those parts and
tasks, parents or teachers should provide assistance.
Please keep in mind that due to the nature of this product as an assembly kit, the motion of the assembled product
cannot be guaranteed. Further, due to the fact that the movements of the assembled product depend in large
part on the method by which it was assembled, we may not be able to provide precise answers to your questions
regarding operations.
The assembly and operation of this product requires the use of a personal computer (Windows Vista or 7,8,8.1,10)
with a USB port. It is assumed that the user has basic computer skills. Please note that we cannot provide
answers to general questions or inquiries regarding computers or Windows.
1
2
3
Caution
The following items are required for the assembly and operation of this product:
●
Personal computer
●
Tools
Preparation
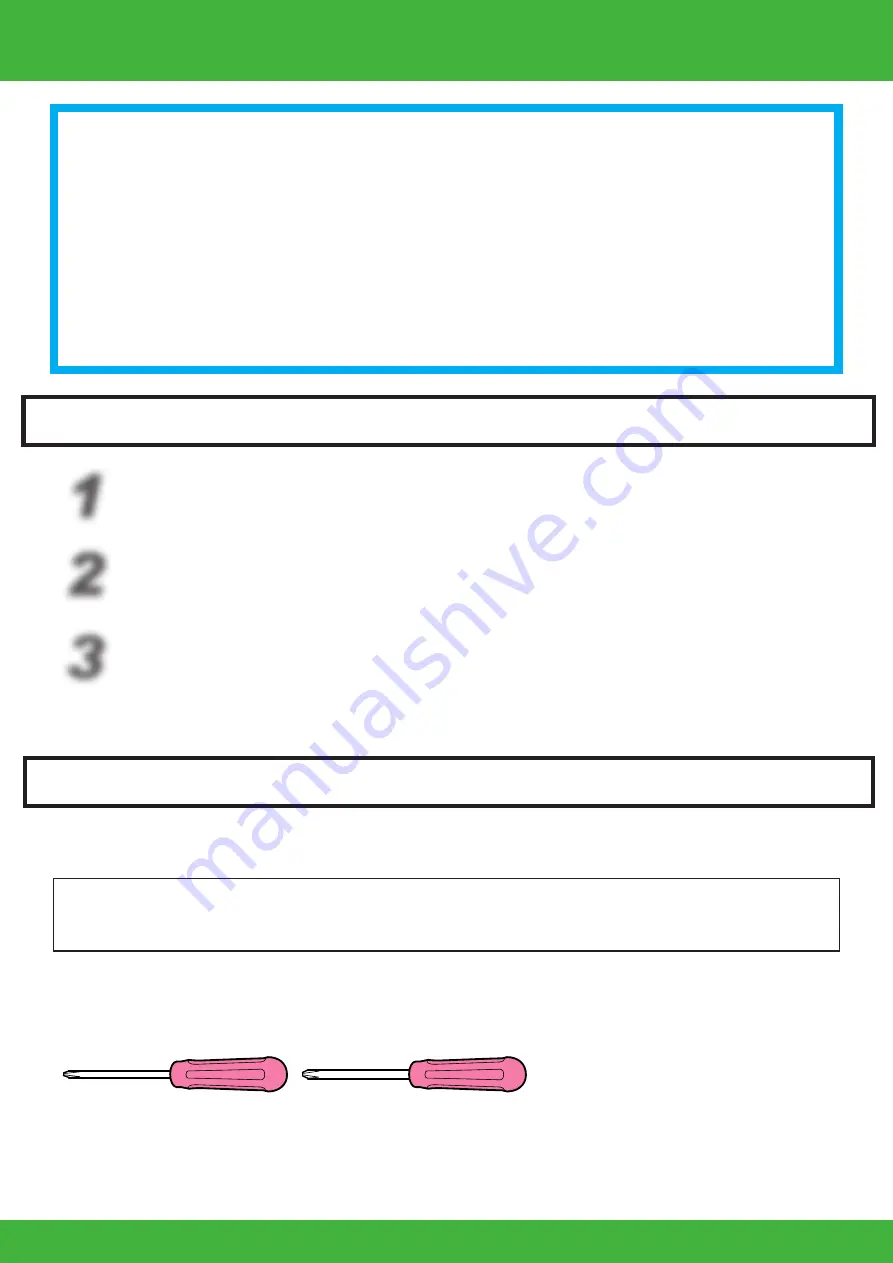
●
#0 and #1 screwdriver
#0
#1
●
Small blade
●
Nippers
for cutting parts and board cover
●
Tape
●
Screw locking adhesive
(moderate strength)
convenient for preventing screws and nuts
from loosening.
●
All company names, trade names, and logo marks that appear in this Instruction are trade marks or registered trade
marks of each respective company.
●
The contents of this Instruction and product are subject to change without notice for improvement or other reasons.
OS: Windows Vista, 7, 8, 8.1, 10
CD-ROM drive(for installation) 1 or more USB 2.0 port(s)
※ Microsoft. NET Frame work 2.0 is required
































































