



















5
No.03146 No.03147(6pcs)
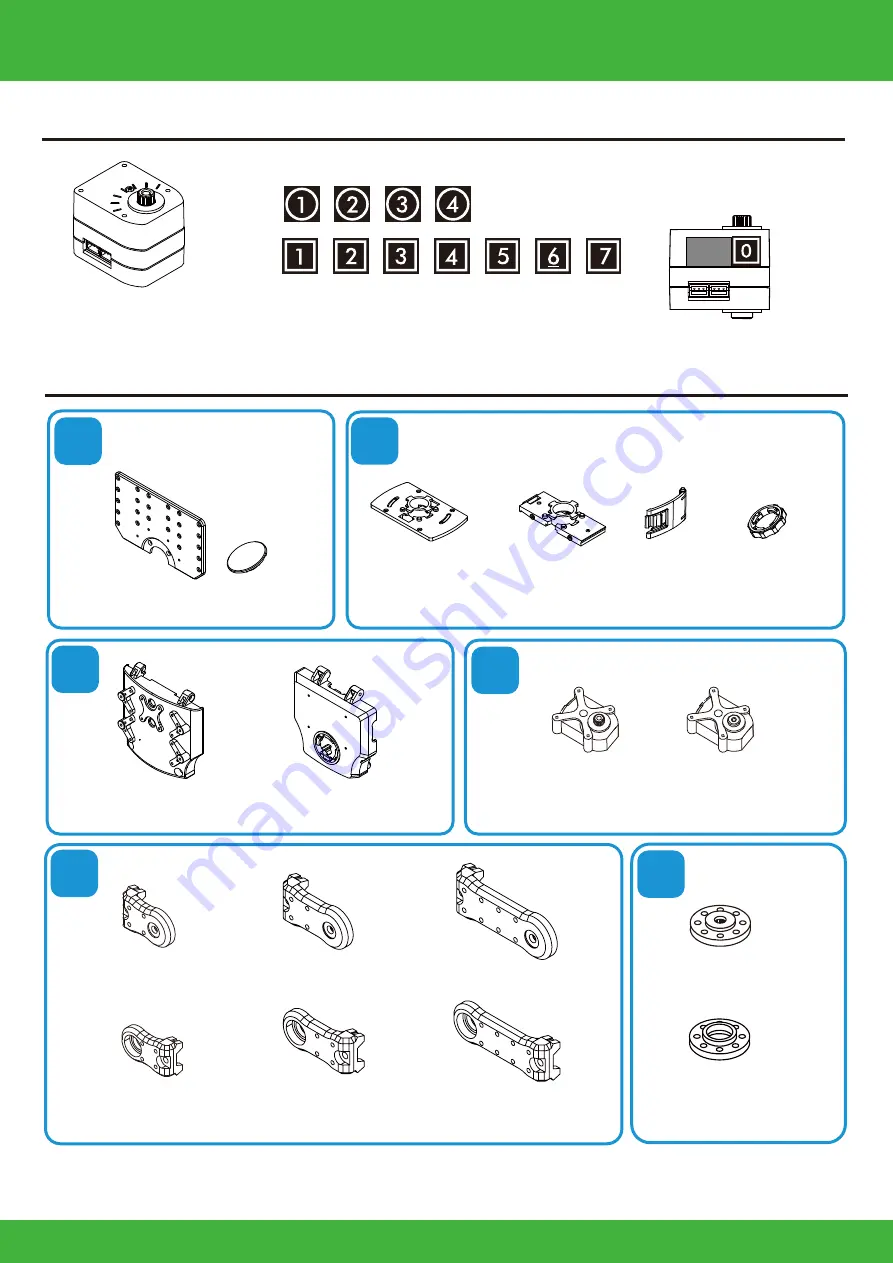
KRS-3302 ICS
x 11
No.03115 No.03116(6pcs)
KRS-3301 ICS
/
x4
x4
x2
x4
x2
x4
E
No. 02304
No. 02304
No. 02303
No. 02303
No. 02302
No. 02302
x4
x1
x2
x2
x2
x1
x1
x1
A
B
C
No. 02313
No. 02313
No. 02312
No. 02312
No. 02313
No. 02311
No. 02313
No. 02311
x1
x1
D
No. 02309
No. 02309
F
x2
x3
No. 02157
No.02159
Example of ID sticker
application
■
Frame Parts
*There may be more parts included in the set than the number used.
*No. xxxxx is the option part number. Use this number for searches and inquiries.
■
Servo
Upper Arm 3300-26
Bottom Arm 3300-26
Upper Arm 3300-26
Bottom Arm 3300-26
Upper Arm 3300-38
Bottom Arm 3300-38
Body Panel
Lock Ring Cap
Lock Ring
BT Box Plate
BT Side Plate BT Hatch
Back Pack Cover
Back Pack Base
Small Diameter
Horn C
Dummy Servo
-Upper
Dummy Servo
-Bottom
Small Diameter
Horn B
Prior to Assembly
List of Parts Used (1)
KXR-L4N
Summary of Contents for KXR-L4N
Page 42: ...42 Complete Assembly completed KXR L4N ...
Page 65: ......

































































